
内置转速测量系统
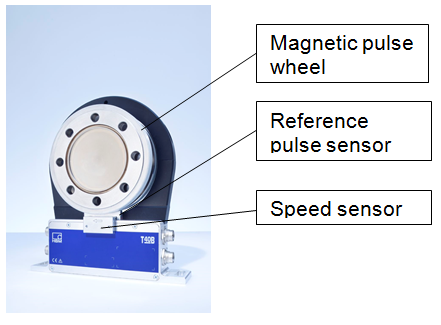
磁学塑料环金属载体 安装在扭矩传感器定子法兰上,并完全集成。这样既节省了空间又简化了安装过程。
系统采用带有一个各向异性磁阻 (AMR) 传感器的无线遥测的磁性脉冲环进行转速测量。当传感器位于磁场中时,阻值的变化和磁化角度以及方向矢量有关。通过对传感器和被测物体的相对运动进行磁场调制,并在径向方向上测量磁场,以获取稳定且可靠的信号。脉冲环和传感器之间的空气间隙为 2.5 mm。
这样使整个测量系统对定子和转子之间的相对运动 - 也就是测试台的震动不敏感。
在市场上有很多转速测量系统。但是这些系统只能进行转速测量。将 转速和扭矩测量功能集成一体的扭矩传感器 能够满足特殊测试需求。
内置转速传感器 非常利于信号处理。如果需要的话,第二轴端无需安装速度测量系统并可用于其它测试任务,例如安装扭矩法兰。
磁学塑料环金属载体 安装在扭矩传感器定子法兰上,并完全集成。这样既节省了空间又简化了安装过程。
系统采用带有一个各向异性磁阻 (AMR) 传感器的无线遥测的磁性脉冲环进行转速测量。当传感器位于磁场中时,阻值的变化和磁化角度以及方向矢量有关。通过对传感器和被测物体的相对运动进行磁场调制,并在径向方向上测量磁场,以获取稳定且可靠的信号。脉冲环和传感器之间的空气间隙为 2.5 mm。
这样使整个测量系统对定子和转子之间的相对运动 - 也就是测试台的震动不敏感。
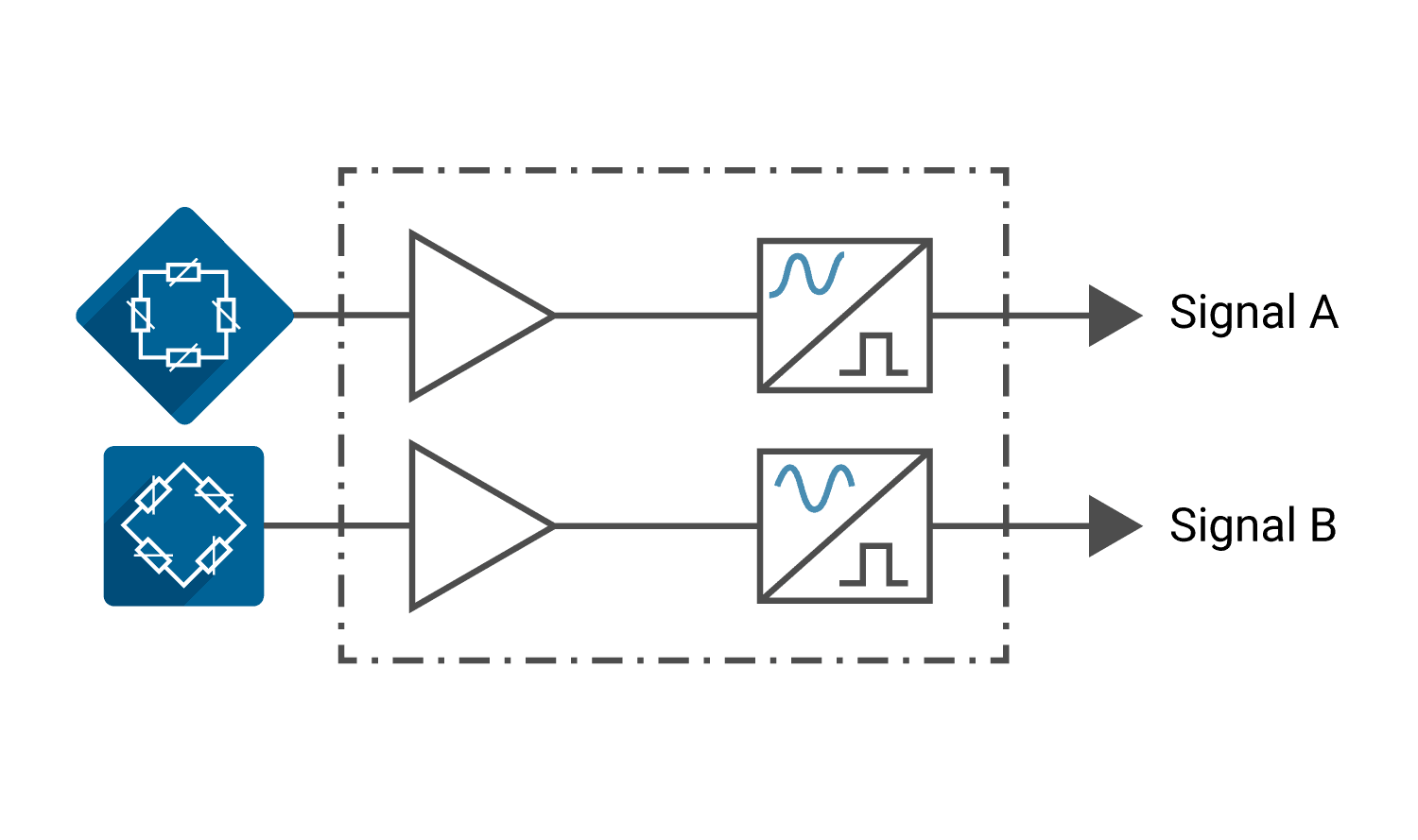
在传动系旋转时,由磁学增量编码器 产生脉冲。每转的脉冲数和速度或位置相对应。系统采用一个 双向增量编码器,也就是 AMR 传感器采用两个全桥用于信号采集。这两个双桥相隔 1/4 周期排列。产生的 正弦和余弦信号 在下游的电子设备中进行数字化。 周期性的正弦和余弦信号通过 差值 方式,进一步通过电子方式提升测量分度。这减少了量化误差,并使输入轴转速的计算精度更为精确。
两个90度的相位差的方波信号 可以作为输出信号。第二个信号 (信号 B) 作为运动方向 (右 - 左) 信号被解码。
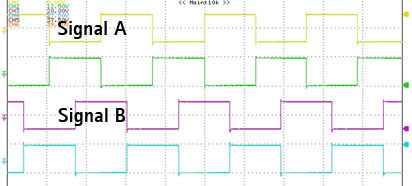
顺时针旋转, 也就是向右, 信号 B 超前信号A 一个相位。信号 B 在上升沿时, 信号 A 位于 '低电平'。这对应着逻辑 "0". 当逆时针旋转时,也就是向左,信号A超前信号B 一个相位。信号A位于上升沿时,信号B位于“高电平”,这对应着逻辑 "1"。
相位输出信号对 A 和 B 也称之为 正交信号, 因为其可以进一步提高分度。信号 A 和 B 在每个级对产生一个脉冲。分辨率可以通过在信号 A 和 B 的双沿触发脉冲来增加,这称之为四倍频。这意味着 T40B 和 T40FM 转速测量系统的分辨率可由每转 1024个脉冲提高到 4096 脉冲。
转速测量系统到驱动控制器的增量传输 的优势是只需 两个信号 就可以传输相关信息,包括运动方向,速度和相对位置。
缺点是:当电源故障后,就无法获得绝对位置,因为转速测量系统仅仅是测量和初始位置的相对变化。对于定位系统来说,知道绝对位置是非常关键的。因此,在上电后,需要执行一个所谓的 "参考运行", 这需要一个 参考脉冲 (0 index).
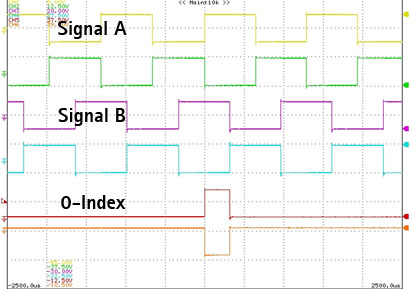
图 4 显示了第三个信号 参考信号 (0 index)。其通过一个单独的传感器产生,感测轴向的磁场,其和信号A 的上升沿同步。在上电后,转速测量系统需要被旋转,直到参考脉冲被检测到。在最后一转,角度的绝对值被记录。转子的定位需要极高的转角精度,通过四倍频的正交信号,系统提供的 转角精度 高达 212 步。
信号的输出时通过一个对称的 5V (TTL)-RS422 信号来实现的。差分信号传输特点是,对所有信号的影响是相同的,因此不会改变信号差。数字化信号传输具有极高的抗干扰性,是长导线或电磁场应用环境的理想解决方案。