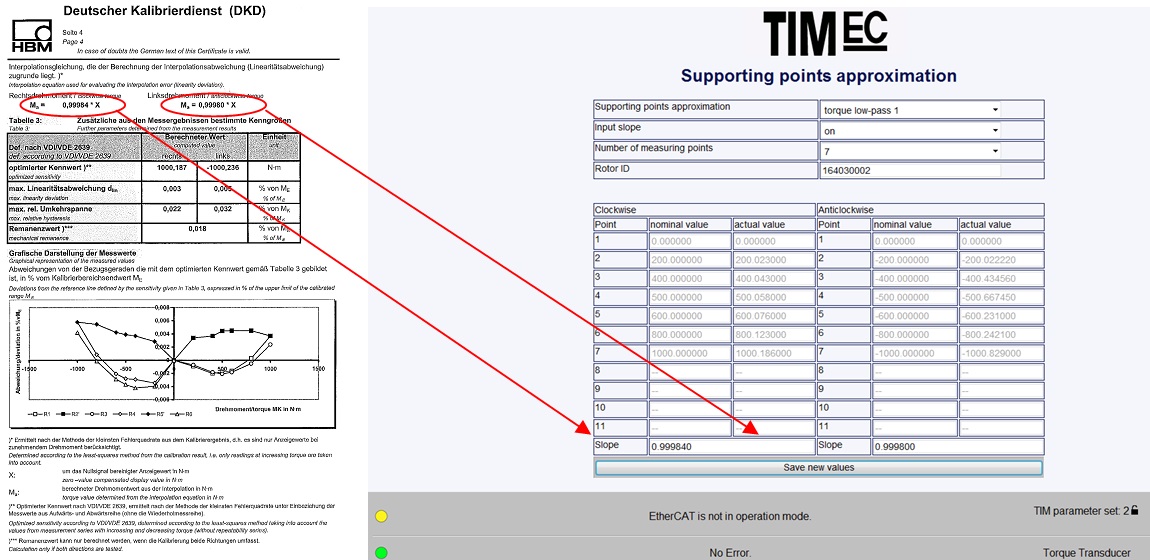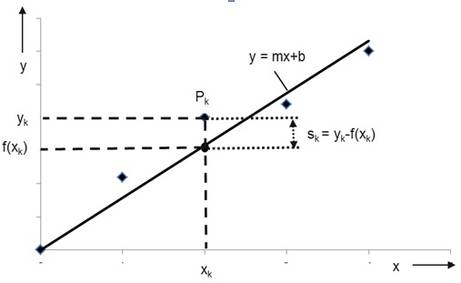
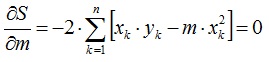
TIM-EC 可以使用上述的高斯最小二乘法来拟合特性曲线。最多可允许11个数据点输入进行线性化。给定值和实际值 可以通过杠杆净重式设备或参考扭矩传感器进行静态测量,现场校准。并且,符合德国 DIN51309 或 VDI/VDE 2646 标准的的标定结果以及线性化函数 y = f(x) 可以直接传递给标定证书和 Web 接口。
通过大量的标定点,降低了潜在的数据传递错误。扭矩传感器序列号 确保了扭矩传感器使用和标定的相关性。当传感器被替换时,序列号自动轮询并和存储的条目进行有效校准。如果序列号和存储的特性曲线无法匹配存储的序列号,当前存储的序列号自动停用并发出警告信息。
通过相连的 Web 服务器的红绿灯功能,信息一目了然 ,见图 3。另外,EtherCAT 自动化系统的错误标志可以进一步分析。