采用 Genesis HighSpeed 和 Perception 软件计算异步电机空气间隙扭矩和空间向量
来自 HBM 的 Genesis HighSpeed 数据记录仪 特别适合逆变异步电机测量。其模块化的设计,可以带有多个测量通道,并提供非常高的采样率。电机的电输入量可以精确地测定,使用Perception软件可计算附加量,例如磁通量或内部空气间隙力矩。.
来自 HBM 的 Genesis HighSpeed 数据记录仪 特别适合逆变异步电机测量。其模块化的设计,可以带有多个测量通道,并提供非常高的采样率。电机的电输入量可以精确地测定,使用Perception软件可计算附加量,例如磁通量或内部空气间隙力矩。.
电动汽车 现在对个人生活来说变得越来越重要, 因为电动汽车使用 可再生能源,很容易用作推进能源 [1]. 图 1.1 显示了电动汽车的原理。车用电池通过充电器进行充电。逆变器转换电池的直流电压为三相交流电压并提供给异步,同步或磁阻电机。
出于技术和经济的原因,异步电机经常被用来在工业和车辆的驱动器。每百公里大约需要 20 kWh,这还取决于重量,驾驶风格和道路情况以及驱动器组件的效率。为提高车辆效能,高效驱动元件是必不可少。
本文中,异步电机的功能首先被解释。然后空间矢量的数学描述以及采用 Perception计算方法被引入。并提供采用 GEN3i 数据记录仪 进行实际测量[5].
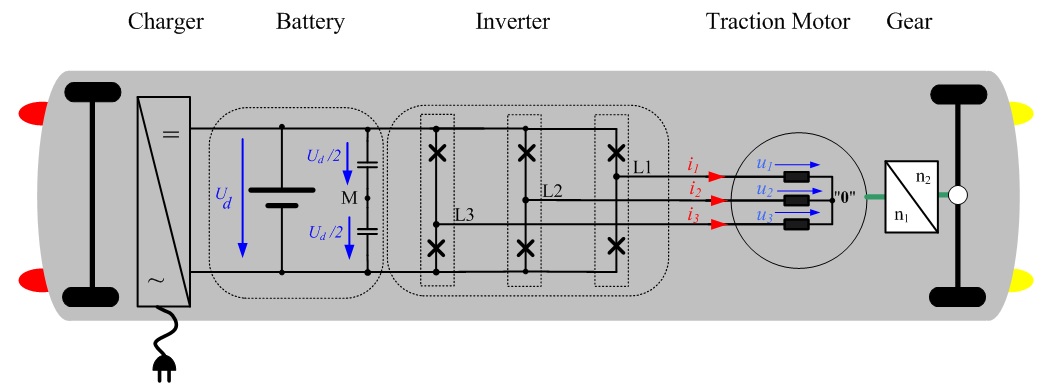
由于其简单并且结构结实,异步电机经常用于牵引传动装置。图 2.1 显示的是一个 鼠笼型异步电动机。定子具有三个绕组。鼠笼型带有铝栅或铜栅,并通过转子端部的导电环短路。
三相时移电流加到偏移绕组产生旋转磁场。磁场以同步转速一起旋转。
![]()
(2.01)
方程2.01 显示了同步转速取决于定子电流频率 fS 和异步电机的极对数量 p。
磁场运行时穿过鼠笼式转子。运动将使导电棒产生电压。由于转子两端带有短路环,导电棒的感应电压将产生大电流。按照 Lenz 定律,在磁场方向转子加速将产生力。这将降低转子和旋转磁场之间的转速差。
图. 2.1: 鼠笼式异步电机结构
a) 截面和 b) 电机刨面
1959 年, Kovacs 开发了空间矢量理论,以方便三相系统的数学描述。其经常用于描述实际应用中异步电机的控制方法。三相系统的电磁参数可以映射到两相正交系统和零序系统。正交系统可以被解释为一个称为空间矢量复数。 其实数和虚数对应复数的投影,显示为复平面 α 和 β 轴的向量。等式 2.02 定义了用于三相量 x1, x2 和 x3 复杂空间矢量 的计算方法。![]()
![]()
(2.02)
带有 α 是一个复杂的运算符。相关联的零序系统的计算方法如下:
(2.03)
图 2.2 显示了直角坐标系中的空间矢量![]() 。 空间向量的实数部分对应横坐标 α ,虚数部分对应纵坐标 β。向量是将空间矢量旋转120° 投影到 a,b,c 轴上得到的。
。 空间向量的实数部分对应横坐标 α ,虚数部分对应纵坐标 β。向量是将空间矢量旋转120° 投影到 a,b,c 轴上得到的。

图. 2.2: 复平面上的空间矢量
电机的工作过程一般采用等效电路图来描述。图 2.3 显示了一个采用空间矢量描述简化的异步电机等效电路图。经由逆变器施加到异步电机的定子电压可以通过空间矢量 ![]() 描述。 定子电流
描述。 定子电流 ![]() 同样接入异步电机。在等效电路图中,定子电阻用 Rs表示, Lμ 是电机的磁化电感。. 电机的漏感为 Lσ. Ry 为转换到定子侧的转子电阻。转速 n ,电磁转角频率为 ω。这两个量可以用极对进行 ρ 相互转换。
同样接入异步电机。在等效电路图中,定子电阻用 Rs表示, Lμ 是电机的磁化电感。. 电机的漏感为 Lσ. Ry 为转换到定子侧的转子电阻。转速 n ,电磁转角频率为 ω。这两个量可以用极对进行 ρ 相互转换。![]() (2.04)
(2.04)
关于异步电机的详细信息,请见参考 [2].
图. 2.3: 简化的异步电机等效电路图
图. 3.1 显示了异步电机相电压 (u1(t),u2(t),u3(t)) 和 相电流 (i1(t),i2(t),i3(t)) 的时间特性。电流和电压的计数方向如图 1.1。空间向量 可以通过等式 2.02 计算。由于 Perception 软件变量需要实数,空间向量的实数和虚数部分可以分别计算。以下等式为相电流和相电压的计算过程。

(3.01)

图 3.1: 测得的相位量 (i1,i2,i3,u1,u2,u3) 和计算出的空间向量 (ia,ib,ua,ub) (用于 Perception, 文件可在网站上免费下载).
定子磁通量 ![]() 描述的是异步电机的磁场。磁通量是通过计算定子电阻 Rs 的压降和定子电压差别的积分获得的。
描述的是异步电机的磁场。磁通量是通过计算定子电阻 Rs 的压降和定子电压差别的积分获得的。
(3.06)
低定子电阻经常被某些电机忽略,这取决于精度的要求。作为积分的结果,磁通量是连续量。如图所示 3.1 为 电子电压的定脉宽调制。磁通量的实数 ψα(t) 和虚数 ψβ(t) 近似于正弦波 (图 3.2a)。作为一个近似值,定子的磁通空间矢量轨迹遵循圆形路径。圆形路径的半径对应于所述定子通量的幅度。
图 3.2: 异步电机定子磁通量 ![]()
a) 实时和虚数的时间特性
b) 复平面中的空间向量轨迹
采用异步电机,所谓的内部或空气间隙扭矩 可以通过电压,磁通量或电流的测量值计算出来。内部的空气间隙扭矩包括不可避免的摩擦力矩和忽略摩擦扭矩的轴的扭矩。计算出的扭矩对应采用扭矩传感器精确测量出的机械扭矩[3]。
计算出的扭矩精度取决于使用的 计算模型 和电机参数精度。内部扭矩的计算值可作为冗余信息补充扭矩传感器的测量信号。电机的扭矩还可以和采用扭矩传感器测量出的整个驱动系的扭矩进行对比。潜在的应用包括混合动力汽车,因为燃烧发动机和电机作用在同一个驱动系中。通过对电机扭矩的计算,燃烧发动机的扭矩也可以测量。
从文献 [2] 得知 异步电机的内部扭矩 可通过定子电流和定子磁通量中计算得出。
![]()
(3.06)
这里, ρ 表示异步电机的极对数。电流和磁通量是由他们的空间矢量分量表示。图 3.3 显示了定子电流和磁通量以及从这些值计算得出的 内部空气间隙扭矩Mi 的时间特性。得到的扭矩脉动是清晰可见的,高频率扭矩是逆变器开关的结果。至关重要的是正确地识别的电动机电流的基波,其可以用于在 Perception 中计算空气间隙扭矩。

图 3.3: 定子电流 (iα, iβ), 定子磁通量 (ψα, ψβ) 和计算出的空气间隙扭矩 Mi 的时间特性
本文介绍了在逆变器异步电机的测量。所测量的相位量被转换成所谓的空间矢量,以便对测量结果的分析。磁通量可通过定子电压积分运算得出。这些量已经计算出的磁量用于异步电动机的内部气隙力矩计算。扭矩计算提供了冗余的测量信息,可作为高精度扭矩传感器的互补信号。计算出的扭矩值允许进行测量的真实性检查,并快速识别测量误差。
[1] D. Eberlein; K. Lang; J. Teigelkötter; K. Kowalski: Elektromobilität auf der Überholspur: Effizienzsteigerung für den Antrieb der Zukunft; Tagungsband 3. Tagung Innovation Messtechnik; 14. Mai 2013
[2] J. Teigelkötter: Energieeffiziente elektrische Antriebe, 1. Auflage, Springer Vieweg Verlag, 2013; ISBN 3-8348-1938-3
[3] R. Schicker; G. Wegener: Drehmoment richtig messen; Hottinger Baldwin Messtechnik GmbH 2002, ISBN 3-00-008945-4
[4] Berechnung von Leistungsgrößen mit Perception-Software
https://www.hbm.com/de/3783/berechnung-von-leistungsgroessen-mit-perception-software/
[5] www.hbm.com