
- 每个模块都是一个数据采集单元
- 车辆测试用独立移动设备
- 台架测试实时集成
- 便携,适合检测服务
- 也适合用于监控应用
QuantumX: 通用,分布式数据采集系统
QuantumX 数据采集系统能可靠采集多种物理量并连接多种传感器,是满足您测试和测量多种需求的理想工具。
灵活
可靠
- 历经 10 年,久经验证
- 专利技术,极高的测量精度
- 长期稳定性并内置校准证书
容易使用
- 小巧且便携
- 通过 HBM catman 软件直观操作
- 面向多个软件平台开放: LabView, Visual Studio .NET, DIAdem, CANape, DASYlab, …
可靠测量链
可靠,高精度、通用数据采集系统 QuantumX 可以与HBM传感器和 CATMAN 软件完美地结合在一起,提供完整的测量和测试解决方案。从传感器到软件:“即插即测”。

多种应用
 实验室和测试台
实验室和测试台
- 结构耐久性测试
- 动力系,发动机和台架测试
- 机电系统和零部件测试
- 空气动力学分析/风洞试验
 汽车数据采集
汽车数据采集
- 汽车及零部件路测
- 车辆动力学测试(驾驶和操纵)
- 制动或验收试验
- 车辆或轨道整体监测
 飞机测试
飞机测试
- 结构耐久性测试 / 疲劳测试
- 推进测试(推力、性能、耐久性)
- 铁鸟测试
- 冲击试验:跌落和冲击试验(鸟,无人机)
- 重心分析
应用案例

西科尔斯基,洛克希德·马丁公司, 与 HBM 共同合作的 GEN6 数据采集系统已经通过操作准备审查(ORR) ,现在正式投入使用。
基于 QuantumX 通用数据采集系统的 GEN6 数据采集系统主要用于西科尔斯基实验室,进行数据采集,处理和存储。

"我们把选择过程缩小到四个测量放大器系统。最终,在实际测试中,HBM 放大器系统赢得了我们的青睐,尤其是其测量不确定度非常低。"
丰田汽车有限公司高级工程师 Bruno Kanzenbach (TMG)

“我们选择 QuantumX 放大器系统的原因主要是其连接非常方便,并且具有优异的数据记录能力,采样率高”.
Agusta Westland 高级结构测试工程师 Matt Williams

QuantumX 模块对比
点击右侧图像来查找和比较所需的 QuantumX 模块
根据测量通道数、采样率或信号类型,例如电压、电流、应变片类型等,选择哪种测量模块或系统是合适的。
一旦找到适合您需要的 QuantumX 产品,向下滚动页面到特定模块以了解更多信息。
点击右边的图片放大。
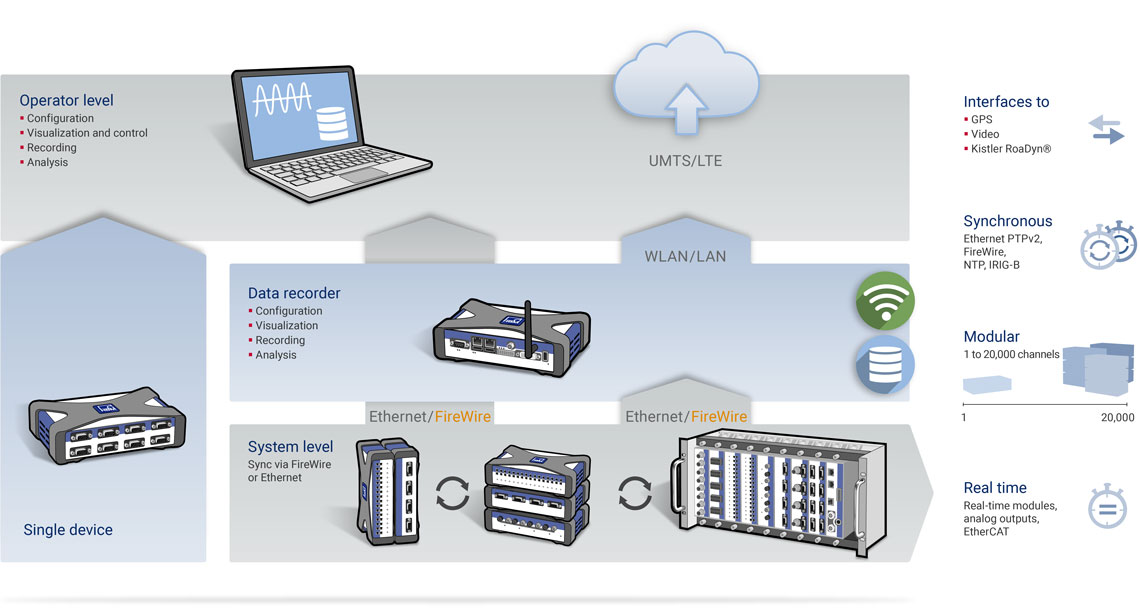
模块化概念
将单个模块连接到PC并开始工作
模块紧靠测量点进行安装,组成分布式系统
可升级到数百个测量通道
强大的数据记录仪功能,进行移动采集,并集成到云
台架测试的实时集成
集成传感器,并将其数字值传输到CAN或模拟电压输出(网关)。
QuantumX 模块

MX440B / MX840B 通用放大器
4 或 8 通道通用放大器
其支持以下传感器技术:
- 应变全桥和半桥 (直流或 4.8 kHz 载频)
- 应变 1/4 桥(带适配器)
- 压电传感器 (IEPE / ICP®)
- 压阻全桥
- 电阻温度计(PT100 / PT1000)
热偶 ( K, N, R, S, T, B, E, J, C型) - 欧姆电阻
- 电位计(Poti)
- 电感全桥和半桥, LVDT
- 电压 (± 100mV, ± 10V, ± 60V) 和电流 (0 / 4 … 20 mA, 2-/3- 或 4-线)
- 通道l 5-8, 另外: 频率, 计数器, 旋转编码器, SSI
- CAN 总线
![]()
MX1615B/MX1616B
桥路放大器
16 通道桥路放大器
支持以下传感器:
- 应变全桥和半桥 (直流或 1200Hz 载频)
- 应变 1/4 桥 (直流或 1200Hz 载频, 120/350/1000 欧姆补偿电阻)
- 电压 (± 10 V)
- 电阻温度计 (Pt100)
- 电阻
- 电位计 (Poti)
![]()
MX410B 通用放大器
4 通道, 高动态通用放大器
其支持以下传感器技术:
- 应变全桥和半桥 (直流或 4.8 kHz 载频)
- 应变 1/4 桥(带适配器)
- 压电传感器 (IEPE, ICP)
- 压阻全桥
- 电感全桥和半桥
- 电压 (±10 V)
- 电流 ( 0 / 4...20 mA, 2-/3- 或 4-线)
- 模拟电压输出(±10 V)
![]()
MX460B 脉冲和频率测量模块
4 通道, 高动态数字模块,用于扭矩,转速,角度,位置,位移测量
其支持以下传感器技术:
- 数字,高分辨率频率输入 (e.g. HBM’扭矩传感器)
- 脉冲计数器, 增量编码器,
- 被动电感转速传感器(交流耦合)
- 脉宽信号 (PWM)
![]()
MX430B 全桥放大器
4 通道高精度全桥测量模块(动态, 静态)
其支持以下传感器技术:
- 应变全桥 (DC, 600 Hz 载频)

MX238B 高精度测量放大器
2 通道高精度应变测量模块
支持以下传感器:
- 应变全桥 (225 Hz 载频)
![]()
MX1601B 通用放大器
16 通道放大器
支持以下传感器:
- 电流供电压电传感器 (IEPE, ICP)
- 电压 (±100 mV, ±10 和 ±60 V)
- 电流 (0/4 ... 20 mA, 2-/3- 或 4-线)
![]()
MX1609 热偶放大器
16 热偶测量模块
支持以下传感器:
- K 型热偶 (MX1609KB)
- T 型热偶 (MX1609TB)
![]()
MX809B 绝缘热偶放大器
8 通道热偶放大器,用于高电势下温度和电压可靠测量
支持以下传感器:
- 热偶 K, J, T, B, E, N, R, S, C 型,带内部冷端连接
- 电压 (±5 V)
 MX403B 电隔离电压测量模块
MX403B 电隔离电压测量模块
4 通道电隔离电压测量模块
支持以下测量:
- 电压 (10, 100 和 1000 V)
- 测量类别: 1250 V (non CAT), 1000 V CAT II, 600 V CAT III
 MXFS 光纤解调仪模块
MXFS 光纤解调仪模块
128通道模块,可将光电测量技术集成到QuantumX测量链中
- 基于布拉格光栅(FBG)的应变、力、加速度或倾角测量
- 每个模块128个通道,传感器密度高,是一种经济高效的解决方案
- 可作为单个模块运行,但也作为网关与其它模块完全时间同步
- 每个通道(传感器)高达2000 S/S的可选采样率

MX471C CAN FD/ Classic CAN 模块
4通道CAN模块支持CAN FD或经典CAN。
- 接收:CAN消息和信号的时间同步采集(嵌入式解码)
- 接收:CAN总线通信的原始消息采集和基于PC的解码
- 接收:扩展到无限数量的模块,例如20个CAN节点
- 传输:使用MX1615B或任何其他模块发送任何采集的模拟测量信号
- 网关:CAN FD到CAN网关,重新打包消息
- 网关:通过以太网从直接连接的模块发送所有数据,并可选择与PTPv2进行时间同步
- 内部可切换终端电阻
![]()
CX22B-W 数据记录仪
CX22B-W 数据记录仪是理想的数据记录仪:
- 连接的 QuantumX/SomatXR 模块所有信号内部存储
- 单机数据记录,健壮的数据格式,并导出为其他格式
- 网关功能 (LAN, WLAN),连接到 PC
- 强大的信号计算和分析功能,例如计数、FFT,功率和效率计算
- 可视化选项
- 相机 (相机, 摄像机), 位置 (GPS/GNSS), 测量轮对, 气象站
- 信号和系统状态报警/通知
- 易于控制(触摸屏、远程或直接控制)

CX27C 网关模块
CX27C 网关提供以下集成选项:
- 通过以太网链将 QuantumX系统连接到您的PC中 – 使用catman Easy/AP 软件以足够高的数据速率采集和分析所有数据
- 通过 xCP-on-Ethernet 将QuantumX 连接到 PC 上运行的任何 CAL 软件
- QuantumX/SomatXR 模块实时集成 (EtherCAT™ 或 PROFINET IRT)
用于控制,自动化和监控
![]()
MX471C CAN FD / 经典 CAN 模块
4通道CAN模块,支持CAN FD 或经典 CAN。
- 接收:CAN信息和信号的时间同步采集(嵌入式解码)
- 接收:完整 CAN总线流的原始信息采集和基于 PC 解码
- 发送:用 MX1615B 或其他模块发送采集到的模拟测量信号
- 网关:CAN FD到CAN网关,并重新打包消息
- 网关:通过以太网从直接连接的模块发送所有数据,并可选择 PTPv2 进行时间同步
- 内部可切换的终端电阻
MXFS 光纤解调仪模块
通道模块,可将光学电测量技术集成到QuantumX测量链中
- 基于布拉格光栅(FBG)的应变、力、加速度或倾角测量
- 每个模块128个通道,传感器密度高,是一种经济高效的解决方案
- 可作为单个模块运行,但也作为网关与其它模块完全时间同步
- 每个通道(传感器)高达2000 S/S的可选采样率
![]()
MX878B 模拟输出模块
8 通道模拟电压输出模块
提供以下功能:
- 8 通道模拟电压输出 (± 10V),用于任何传感器输入的实时输出
- 实时计算(矩阵、PID、报警等)
- 数据集概况输出 (谐波或任意)
- 从 PC 直接控制
![]()
MX879B 多 / IO 模块
多输入/输出模块,用于模拟电压和数字 输入/输出
提供以下功能:
- 8 通道模拟电压输出 (± 10V),用于任何传感器输入的实时输出
- 32 通道 输入/输出 (5 V, 24 V, 最大500 mA)
- 实时计算(矩阵、PID、报警等)
- 数据集概况输出 (谐波或任意)
- 从 PC 直接控制
![]()
MX471B CAN 模块
4 通道 CAN 模块,用于 CAN 信号采集或将其集成到 CAN 系统中。
- CAN 信号同步采集(原始或解码)
- CAN 总线测量信号传输(生成DBC文件)
- xCP-on-CAN 信号同步采集
- CAN-to-CAN 网关 (电隔离、重新封装、类型转换)
- 内部可切换的终端电阻
catman 数据采集软件
catman 完美匹配 HBM QuantumX 和 SomatXR 数据采集系统。可视化您的传感器和测量数据,以健壮的二进制格式存储数据,可用于自动化,实时或后处理模式分析数据,并生成测试报告。

QuantumX 视频和手册
本视频展示了 QuantumX 提供的特性
本视频演示了如何使用 catman Enterprise 软件进行参数化设置及测试通道可视化。