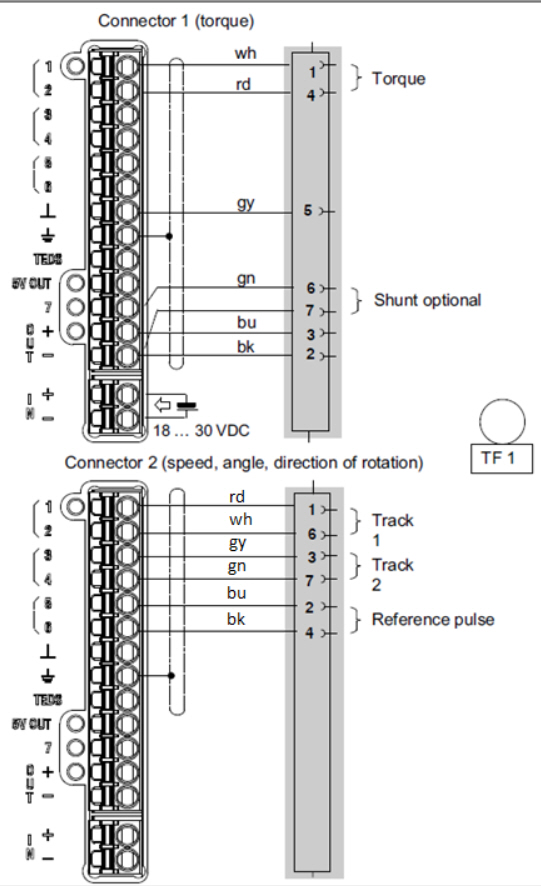
Connector 1: 1-KAB153-6 (torque)
Connector2: 1-KAB154-6 (speed); 1-KAB164-6 (speed and angle)
The sensor used in this example is a T40B with:
- Nominal Torque: 100 Nm
- Maximum Speed: 20 000 rpm
- Shunt Signal: 49,38 Nm
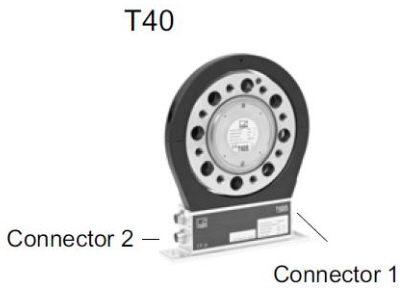
This is a quickstart guide on connecting a T40 torque flange to a PMX System.
Connector 1: 1-KAB153-6 (torque)
Connector2: 1-KAB154-6 (speed); 1-KAB164-6 (speed and angle)
The sensor used in this example is a T40B with:
Connector 1:
Supply voltage and frequency output signal
Connector 2:
Rotational speed output signal, reference pulse (optional)

Figure: PX460 – one torque flange, torque, speed and angle/direction of rotation
The measured values fluctuate around the real value dependent on the measurement principle (pulse counting). Therefore set filter provisionally on 500Hz then adapt to application.


Apply Settings according to the figure below


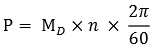
Equation to calculate the power:
Units:
P: W
M: Nm
n: rpm
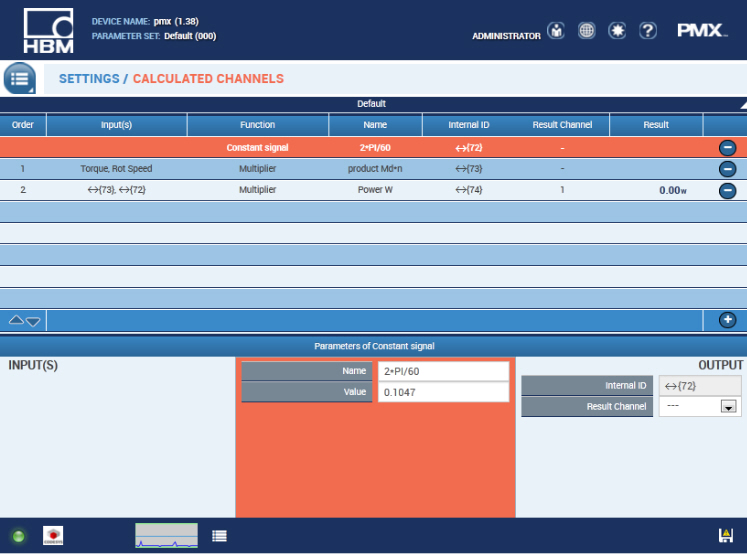
The factors torque and speed are multiplied (here: InternalID {73})
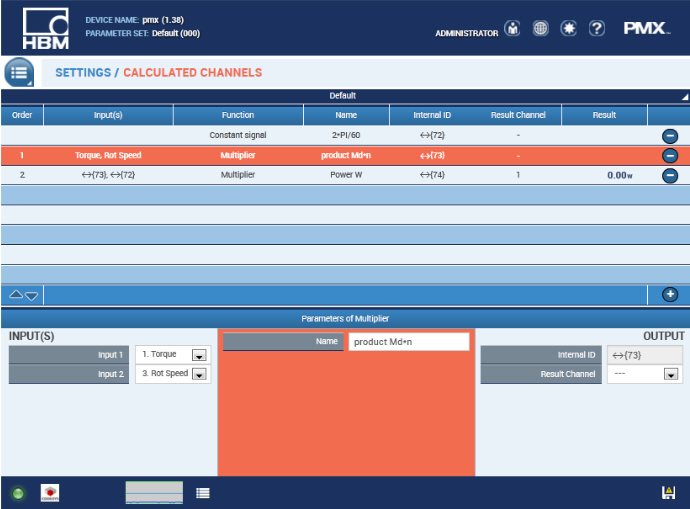
Power is calculated by multiplying the previous introduced internal channels
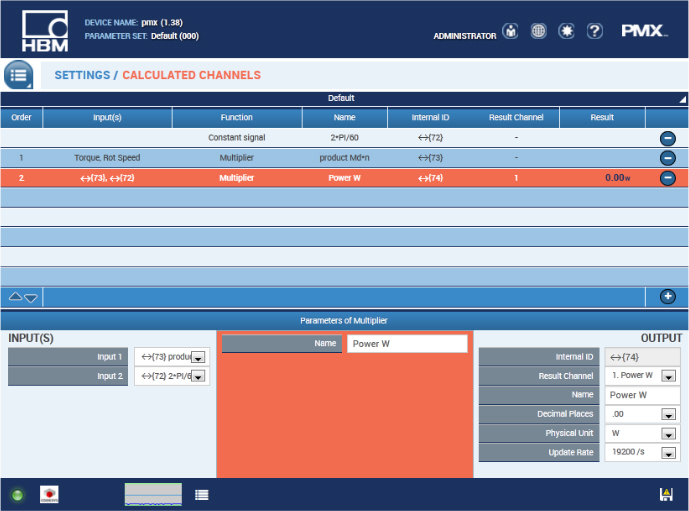
the Result is shown on Calculated Channel 1

These examples are simply for the purpose of illustration. They cannot be used as the basis for any warranty or liability claims.