Geisenheim 大学制定了陡坡机械化种植新概念: 葡萄栽培机器人 "Geisi". Geisi 可以在 70 度陡坡上进行机械化耕种,并可远程控制
在陡峭的山坡进行葡萄种植是德国葡萄酒产区的独特风景。然而,陡坡种植的比例稳步下降。到2010年,陡坡种植的总面积下降到只有9%。其中重要原因,就是陡坡种植需要完全由手工完成 - 危险并且费用昂贵。盖森海姆大学技术研究所,希望通过机器人来改善这种状况。
Schwarz 教授领导的研发小组已着手制定陡坡机械化工作的新概念: 葡萄栽培机器人 Geisi。和现在的机械栽培设备不同,Geisi 能够在 70 度的陡坡上进行工作 - 没有绳索并可远程控制。其可大幅降低降低栽种成本,并且更加安全。
从长远来看,机械化陡坡种植能够完成典型的栽培工作,例如作物保护,地膜覆盖,修剪枝叶等。并且费用低廉,更加安全。
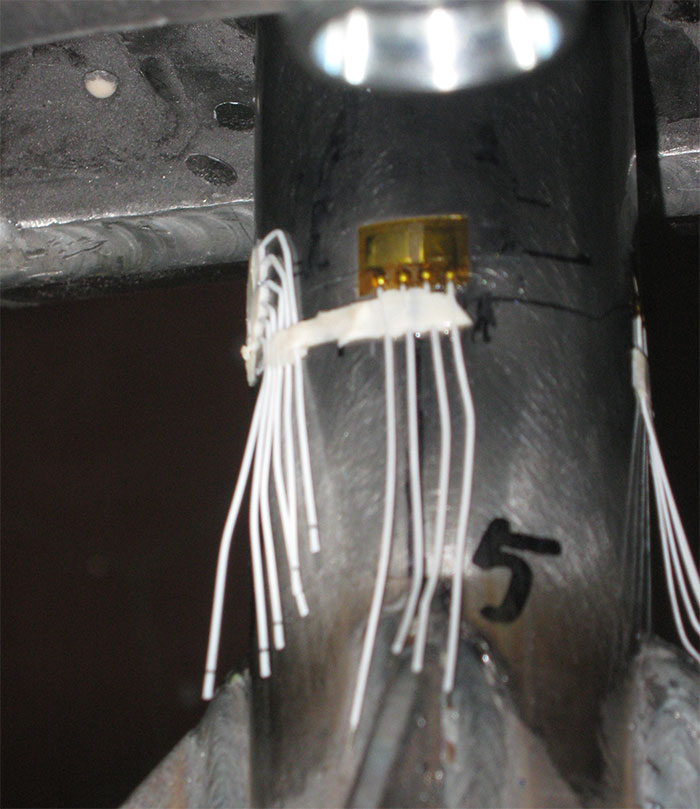
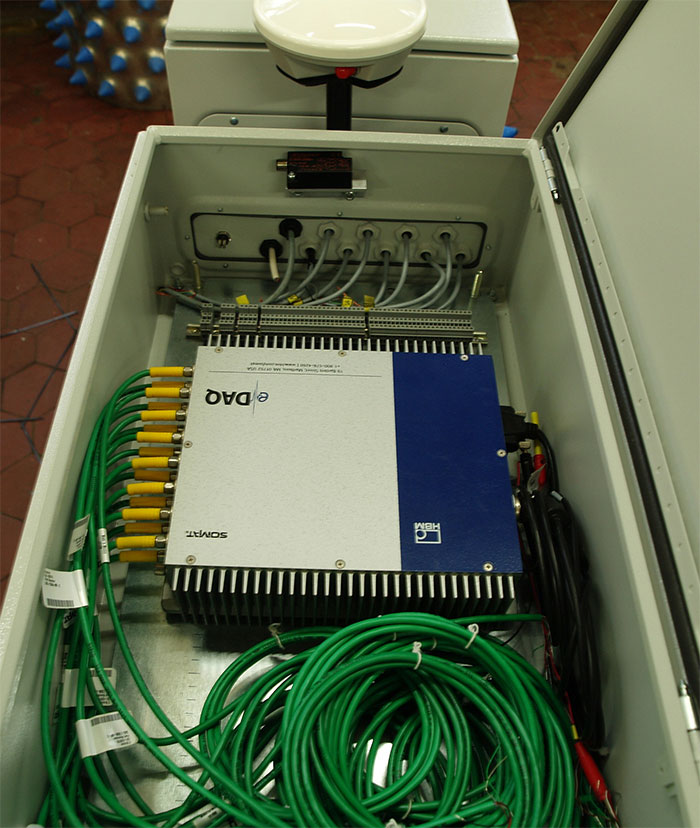
为了使 Geisi 能在陡峭的山坡上自主,可靠地移动,HBM 提供了坚固可靠的移动数据采集系统 Somat eDAQ 和应变片对其进行了测试。