
如果形状记忆元件在马氏体状态下发生机械变形,如超过临界应力,会以稳定的状态出现高延伸率(高达约8%)。如果随后温度升高,由马氏体转变为奥氏体状态时,则会发生形状记忆元件的重塑。这个过程是迟滞和可逆的 [1]。如图1所示,通过电加热,形状记忆线可以在状态1和2之间来回切换。在材料转换过程中,可以检测到电阻的显著变化。
FG线驱动器通常由镍钛合金组成,在连续操作中可产生400兆帕的最大拉应力,一次性操作时可产生800兆帕的最大拉应力[2]。例如,一根1g自重的FG电线可以移动5000g的负载。
由于上述特性,通过形状记忆效应可以实现非常轻巧和紧凑的触觉元件。


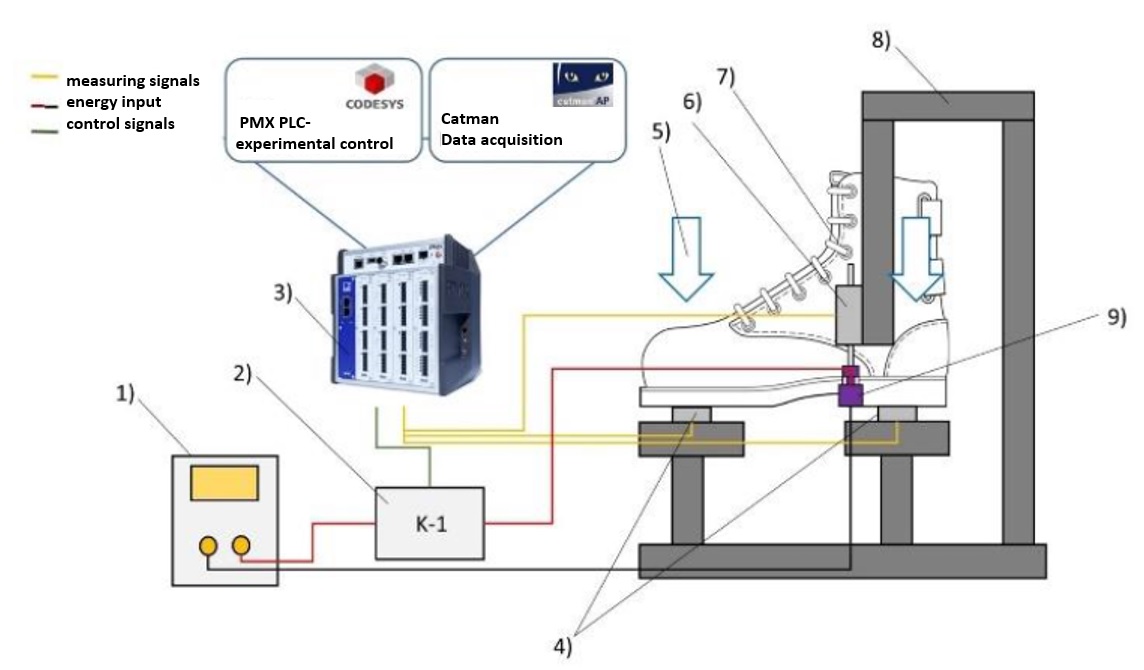

 of the shoe at a current impulse of 2.8 A and 1.2 V.")