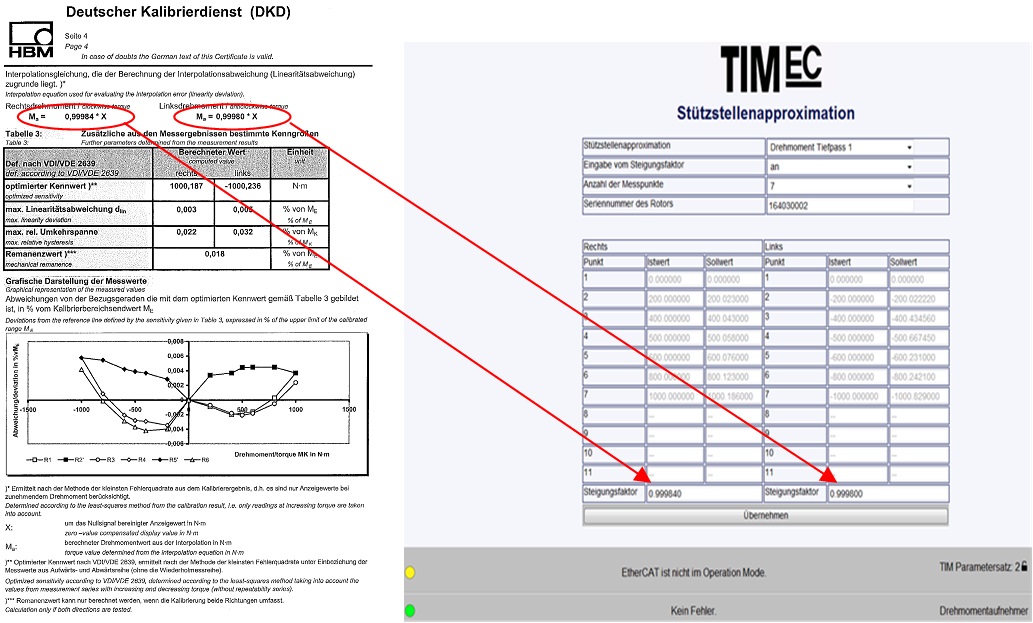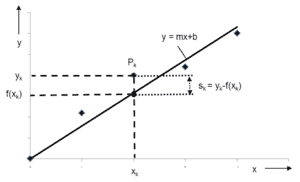
TIM-EC ermöglicht eine Linearisierung bzw. Approximation der Sensorkennlinie nach dem zuvor beschriebenen Verfahren der Gaußschen Fehlerquadrat Methode. Die Linearisierung erlaubt es, eine Sensorkennlinie mit bis zu 11 Stützstellen einzugeben. Die Soll-und Ist-Werte in Nm können z. B. durch eine Kalibrierung vor Ort im Prüfstand mittels Hebelarm–Totlastgewichtsanlage oder mit einem stationär messenden Referenzdrehmomentaufnehmer ermittelt werden. Darüber hinaus besteht die Möglichkeit, die aus einer Kalibrierung, z. B. nach DIN51309 oder VDI/VDE 2646, ermittelten Kalibrierergebnisse und die daraus ermittelte Funktionsgleichung zur Linearisierung der Kennlinie der Form y = f(x) aus dem Kalibrierschein direkt in das Webinterface zu übernehmen.
Das reduziert z. B. bei einer großen Anzahl von Kalibrierpunkten mögliche Übernahmefehler sowie die Eingabezeit auf ein Minimum. Durch Übernahme der Seriennummer des Drehmomentaufnehmers besteht ein eindeutiger Zusammenhang zwischen dem eingesetzten Drehmomentaufnehmer und seiner Kalibrierung. Bei Wechsel des Drehmomentaufnehmers wird automatisch die Seriennummer abgefragt und mit dem gespeicherten, für die Kalibrierung gültigen Eintrag verglichen. Stimmt die Seriennummer und damit auch die gespeicherte Kennlinie des angeschlossenen Drehmomentaufnehmers mit der gespeicherten Seriennummer nicht überein, wird die aktuell gespeicherte Kennlinie automatisch deaktiviert und eine Warnmeldung erzeugt.
Im angeschlossenen Webserver wird diese übersichtlich über die Ampelfunktion dargestellt. Siehe Abb.3. Zusätzlich wird eine Error Flag auf dem EtherCAT zur weiteren Auswertung an die Steuerung bzw. Automatisierung abgesetzt.