Berechnungskanal erstellen
Erstellen Sie einen neuen Berechnungskanal „Winkelsynchrones Filter“ in der Kategorie Auswertung.
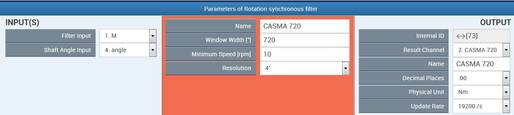
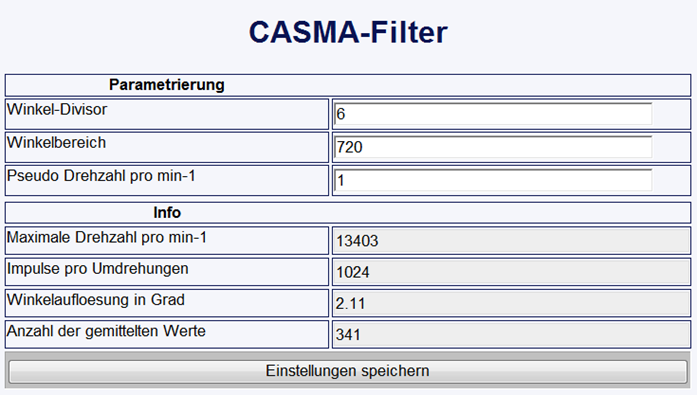
Parameter einstellen
- Filtereingabe: Geben Sie hier das zu filternde Signal an.
- Winkel: Geben Sie hier das Signal des Drehwinkelsensors an. Die Messwerte müssen zwischen 0° und 360° liegen.
- Fensterbreite: Geben Sie hier an, über welchen Bereich die gleitende Mittelwertbildung erfolgen soll. Die Breite muss zwischen 30° und 720° liegen, die Voreinstellung ist 180°. Das Verhältnis zwischen Fensterbreite und Auflösung muss kleiner als 180 sein.
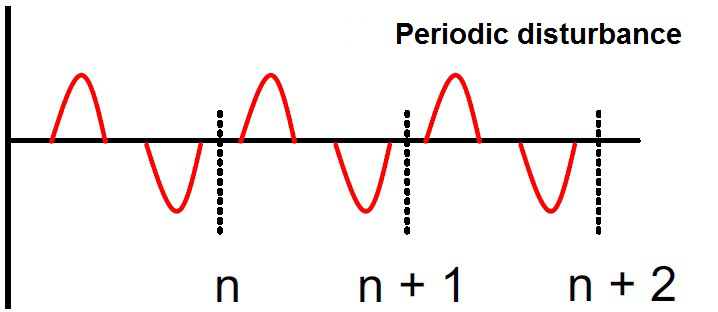
Die Fensterbreite kann ganz einfach experimentell ermittelt werden, indem man die Periodendauer der Störung auf den Drehwinkel projiziert (siehe Screenshot). In diesem Beispiel ergibt sich eine periodische Störung alle 720°.

- Minimale Drehzahl: Diese virtuelle Drehzahl kommt zum Einsatz, wenn das anliegende Drehzahlsignal kleiner ist als die definierte Minimaldrehzahl.
- Auflösung: Dieser Wert legt fest, wie häufig (alle wie viel Grad) ein neuer Mittelwert berechnet wird. Beachten Sie, dass die maximal zulässige Drehzahl von diesem Wert abhängt, da die Berechnungsgeschwindigkeit durch die Gesamtaktualisierungsrate festgelegt ist. Als theoretischer Wert ergibt sich:
Maximale Drehzahl = Auflösung * Gesamtaktualisierungsrate / 6.
Sie sollten jedoch in der Praxis Werte verwenden, die nur 10% bis 20% dieser theoretisch maximal möglichen Drehzahl betragen.
Auflösung | Theoretische max. Drehzahl bei 19.200 Hz Gesamtaktualisierungsrate | Theoretische max. Drehzahl bei 38.400 Hz Gesamtaktualisierungsrate |
1° | 3200 U/min | 6400 U/min |
2° | 6400 U/min | 12.800 U/min |
4° | 12.800 U/min | 25.600 U/min |
6° | 19.200 U/min | 38.400 U/min |
8° | 25.600 U/min | 51.200 U/min |
Die folgenden Vielfachen der Drehzahl werden abhängig von der Fensterbreite unterdrückt:
Fensterbreite | Vielfache |
90° | 4, 8, 12, … |
120° | 3, 6, 9, … |
180° | 2, 4, 6, … |
360° | 1, 2, 3, … |
720° | 0, 5, 1, 1, 5, … |
Hinweis: Falls eines der Quellsignale ungültig ist, wird auch das Ausgangssignal ungültig.
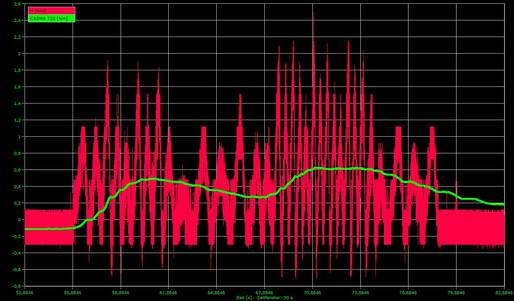
CASMA in Aktion
Ungefiltertes Drehmomentsignal (rot), durch CASMA gefiltertes Drehmoment (grün).
Hierbei ist klar zu sehen, dass das CASMA-Filter eine sehr gute Stabilisierung der Drehmomentmessungen in Korrelation zur Motordrehzahl erreicht, die sich ebenfalls im Zeitverlauf ändert. Je größer die Breite des Filters ist, desto besser sind die Ergebnisse.