Aug 29 2019
Electrical Connection of Force Transducers
Read More
 In this example the force to be measured, Fin, is applied to the transducer at an angle denoted by α. The force vector of the applied force is then distributed into two components Fz and Fx. Only the force in the Z direction, which is smaller than the applied force, is measured at the sensor.
In this example the force to be measured, Fin, is applied to the transducer at an angle denoted by α. The force vector of the applied force is then distributed into two components Fz and Fx. Only the force in the Z direction, which is smaller than the applied force, is measured at the sensor. a. Lateral forces
a. Lateral forces b. Bending moments
b. Bending moments The bending moment is generated on the left side because the load is applied eccentrically In this case there is no lateral force.
A bending moment is generated on the left side because the intrinsic weight of the load application produces a lever. The distance from the center of gravity to the force transducer is the length of the lever. The weight is transformed into a force in this simple case. The moment is obtained by multiplying force times the lever arm. In addition, the weight force acts on the transducer as a lateral force. Both parasitic influences must be taken into consideration.
The bending moment is generated on the left side because the load is applied eccentrically In this case there is no lateral force.
A bending moment is generated on the left side because the intrinsic weight of the load application produces a lever. The distance from the center of gravity to the force transducer is the length of the lever. The weight is transformed into a force in this simple case. The moment is obtained by multiplying force times the lever arm. In addition, the weight force acts on the transducer as a lateral force. Both parasitic influences must be taken into consideration.

 Transducers designed so they are only able to record forces in the pressure direction are generally equipped with a convex fitting for application of the load.
The application of force on the load button can be implemented with the load application aids that are available for many models. These include for example thrust pieces as shown in the sketch below.
Transducers designed so they are only able to record forces in the pressure direction are generally equipped with a convex fitting for application of the load.
The application of force on the load button can be implemented with the load application aids that are available for many models. These include for example thrust pieces as shown in the sketch below.
 A thrust piece of this type is simply placed on the load application point. Care must merely be taken that there are no extraneous objects between the thrust piece and the force transducer. The thrust piece has a rotating bearing and the angle to the transducer can be changed so that bending moments and torques are not applied to the transducer.
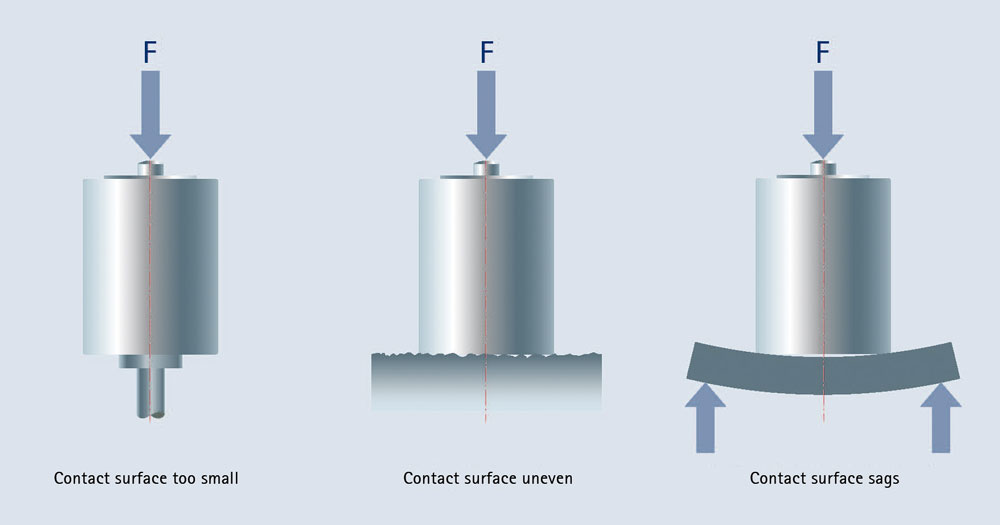
If a force transducer is installed without a thrust piece of this type, the following requirements must be met for the component that comes in contact with the convex force application area:
A thrust piece of this type is simply placed on the load application point. Care must merely be taken that there are no extraneous objects between the thrust piece and the force transducer. The thrust piece has a rotating bearing and the angle to the transducer can be changed so that bending moments and torques are not applied to the transducer.
If a force transducer is installed without a thrust piece of this type, the following requirements must be met for the component that comes in contact with the convex force application area:
"If tensile forces will be measured in addition to compressive forces, convex load application is naturally unsuitable. For tensile force transducers or force transducers that are suitable for tensile and compressive forces, the components that apply the force to the transducer are therefore screwed together with the transducer. Some force transducers, for example the Z4A or U2B, have an external thread on the top and an internal thread on the bottom. Force transducers of series U10M and U10S are fitted with internal threads on both connection sides. Internal threads are considerably more compact. This makes them suitable for force transducers that must be flat. In external threads the distance between the screw connection and SG installation is naturally greater, which has a positive effect on various metrological properties (hysteresis!). Force transducers for tensile and compressive loading with very high requirements for accuracy and reproducibility therefore generally have an external thread. An internal thread is only used on the non-critical side. For internal thread: For every bolted connection of a force transducer, sufficient surface pressure must be exerted on the force transducer by the nut.
There are two different ways to do this:
a. A bolted connection with application of force that is greater than the largest operating force
b. Mounting with suitable torque
Note that the torque required for mounting must never be applied through the transducer. If it is, the transducer may be destroyed. For force transducers with external thread: The component to be connected must at least be fixed in place by a locknut. This requirement is eliminated for purely static force measurements. The torques are specified in the operating manuals for the force transducers. ; The Z4A (right) is only locked on the internal thread. Locking with a nut is always required for the external thread of the U2B (left) HBM offers knuckle eyes for almost all transducers that are suitable for tensile and compressive forces. If force transducers are mounted using at least one knuckle eye, torsional moments are not applied to the transducer. If two knuckle eyes are used, bending moments and forces must not be applied to the force transducer at an angle.
Use of two knuckle eyes for calibration of a U10M with a maximum capacity of 500 kN Knuckle eyes are normally not suitable for measuring dynamic forces because bearing play increases over time, which can lead to measurement errors. Furthermore, the frequency range within which knuckle eyes can be used is limited to about 10 Hz. For dynamic requirements we therefore recommend the use of pliable elements to apply forces."

This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.
This will bring together HBM, Brüel & Kjær, nCode, ReliaSoft, and Discom brands, helping you innovate faster for a cleaner, healthier, and more productive world.