

Condiciones de temperatura:
- Diferencia de temperatura con respecto al valor de referencia: 40 °C (para TCC)
- Estabilidad térmica: 1 °C (para TCcero)
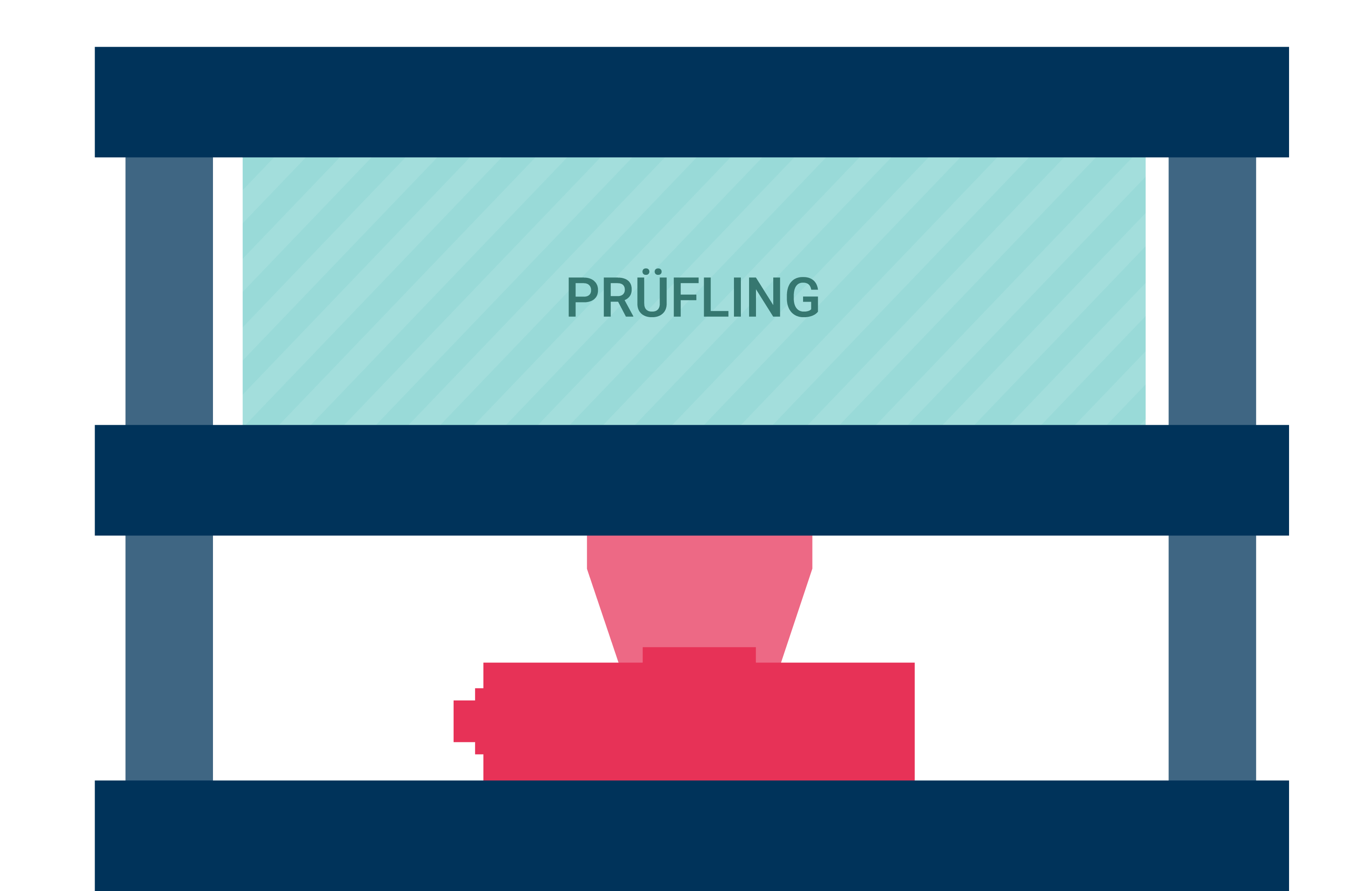
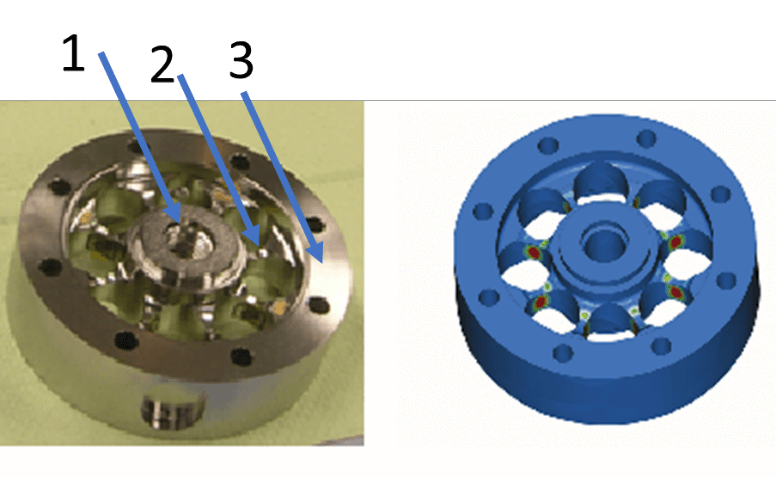
Introducción de fuerza:
- Introducción de fuerza por la parte central con una tolerancia muy estrecha
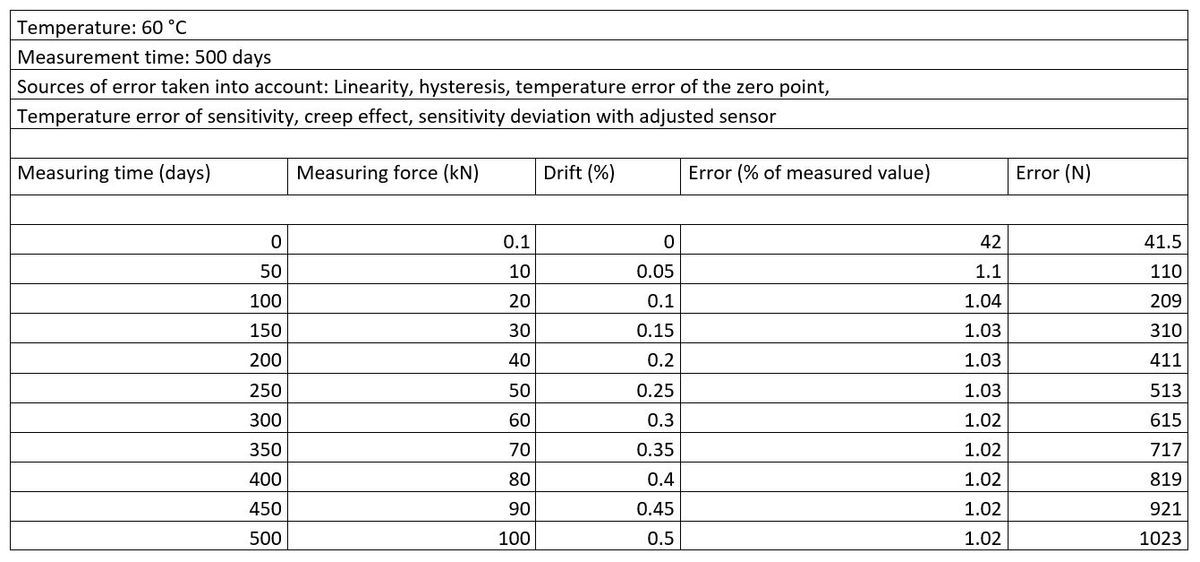
Supongamos una situación en donde la respuesta de fuerza aumenta de forma lineal a lo largo de la prueba, desde un valor inicial de aprox. 100 N hasta un valor final de 100 kN. Se utiliza un transductor de fuerza C10/100KN de HBK.
Por lo tanto, es necesario calcular el error en diferentes puntos del gráfico de respuesta tiempo-fuerza. Para que el ejemplo resulte más sencillo, se asume que el aumento de la fuerza es lineal (0 N el primer día, 100 kN después de 500 días).
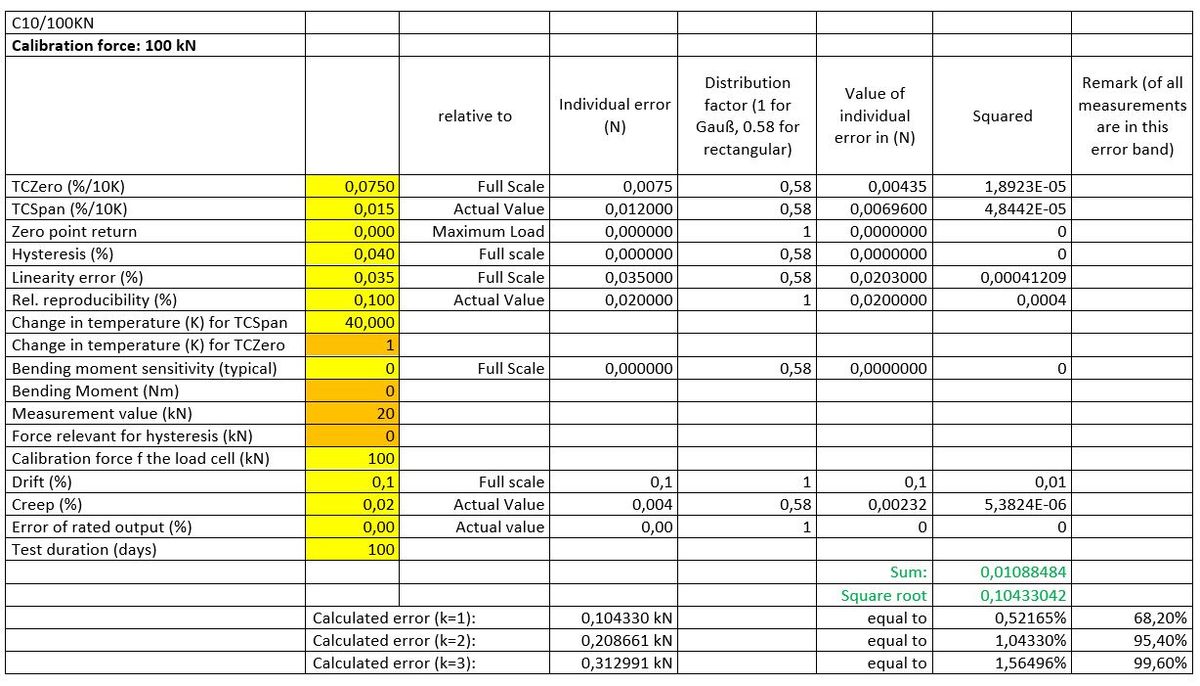
Los errores individuales relevantes se recogen en la tabla de la Figura 7.
Como ejemplo, se presenta el resultado correspondiente al día n.º 100, en el que la fuerza aplicada es de aproximadamente 20 kN.