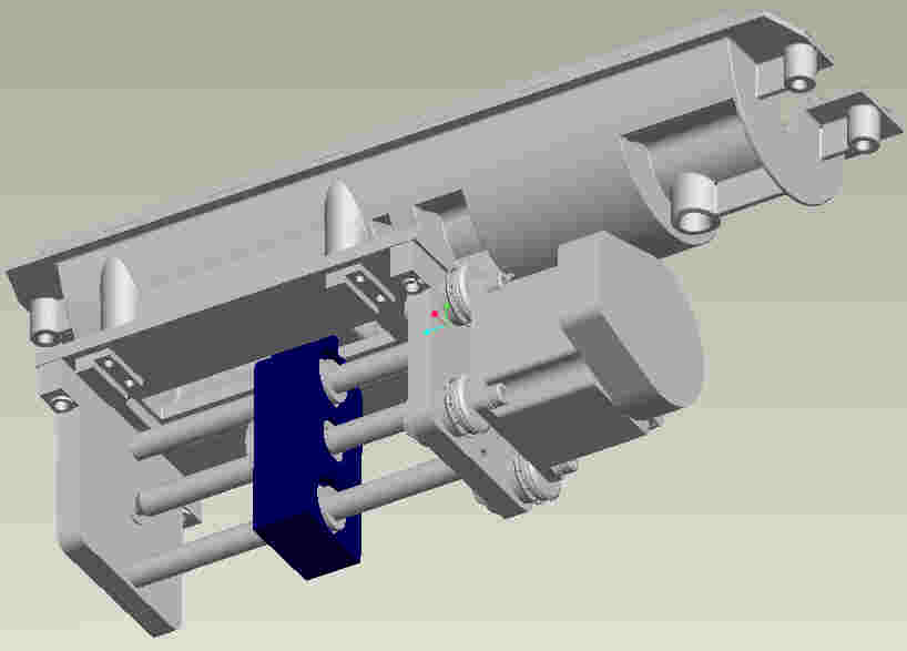
Vamos a recurrir a un ejemplo concreto para abordar la cuestión final: cómo convertir un elemento estructural en un sensor (Figura 4). En nuestro ejemplo, un cliente utiliza un motor para accionar un tornillo que mueve una prensa, con la que aplica trabajo en una cámara. El cliente necesitaba determinar el valor real de la fuerza que ejerce la prensa, para accionar el motor dentro de un determinado rango mediante un circuito de control. Después de estudiar el problema, se decidió utilizar la prensa como sensor activo, ya que no exigía introducir cambios en la estructura del sistema.
Cómo convertir un componente en un sensor activo
En muchas aplicaciones que requieren medir fuerza, carga, presión o par no es posible instalar un sensor estándar, ya sea debido a limitaciones de espacio o a que, para instalarlo, sería preciso hacer modificaciones costosas en la propia aplicación. Este artículo explica de manera general cuál es la forma más eficaz de transformar una pieza de soporte o de transferencia de carga ya existente en un sensor, con la ayuda de galgas extensométricas.
Tipos de galgas extensométricas
Existen diferentes categorías de galgas extensométricas, capaces de adaptarse a aplicaciones muy variadas. El ,montaje más sencillo es una galga extensométrica lineal; es lo que se llama un cuarto de puente (de Wheatstone) y puede utilizarse de distintas maneras. Las rosetas en T tienen dos rejillas de medición —o lo que llamamos un ½ puente—; las rejillas forman un ángulo de 90° entre sí, lo que permite medir la deformación axial y el efecto de Poisson sobre un mismo soporte. Esta técnica puede utilizarse en sensores de viga a flexión/cizallamiento, sensores tipo columna o para medir par.
Aplicaciones
Las galgas extensométricas tienen numerosas aplicaciones. Dependiendo de las mediciones que se vayan a realizar, se pueden utilizar diferentes patrones de galgas extensométricas. La Figura 1 muestra algunos ejemplos de aplicaciones. En las aplicaciones médicas, se utilizan galgas extensométricas para detectar oclusión en las bombas de infusión midiendo la presión. También se emplean para medir par en los robots médicos y para medir fuerza en todo tipo de dispositivos médicos que pueden exigir que las galgas extensométricas o los sensores resistan cientos de ciclos de esterilización en autoclave.

Los equipos agrícolas son cada vez más "inteligentes" e incorporan galgas extensométricas en numerosas aplicaciones; por ejemplo en los sensores de fuerza de descenso de las máquinas sembradoras o para medir par en tractores autónomos. En el caso de las grúas y los vehículos especiales, se deben tener en cuenta muchos aspectos de seguridad, como la protección contra el vuelco o las sobrecargas. Los robots industriales se están introduciendo en todos los sectores de producción y requieren sensores de alta precisión para sus bucles de feedback de fuerza. Al final, todo se reduce a disponer de sensores capaces de medir cambios en magnitudes mecánicos y a adaptarlos para obtener medidas con la máxima precisión posible.
Figura 1: Aplicaciones




Principios
Las cuatro magnitudes básicas de medida son la fuerza, la masa, el par y la presión. Pensemos en una columna de soporte a la que se aplica una fuerza mediante tracción o compresión. En realidad, la viga se alarga cuando la fuerza tira de ella y se contrae cuando se le aplica una fuerza de compresión, que hace aumentar su diámetro.
En este ejemplo, cuando una fuerza estira la viga se registra una deformación axial positiva; en cambio, un sensor situado a 90º con respecto a la dirección de la fuerza detectaría una deformación compresiva negativa, porque la viga se hace más delgada cuando se la estira. En un sensor tipo columna, ocurre justamente lo contrario cuando se aplica una carga a la viga. Todos estos tipos de medidas tienen en común que la deformación se expresa como una variación de longitud “Δl” con respecto al valor de longitud “l” original.
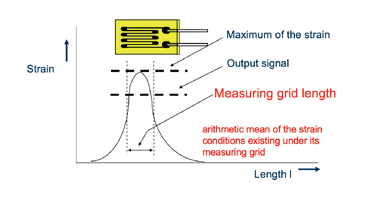
Ahora bien, cuando se instala una galga extensométrica sobre un soporte de este tipo, no medimos en un único punto activo. Lo que se obtiene es una media aritmética a lo largo de la longitud activa de la rejilla, es decir, entre los puntos en los que la rejilla de la galga extensométrica cambia de sentido. Como puede verse en la Figura 2, se obtiene una media de todas las deformaciones a lo largo de la longitud de la rejilla de medición. Esa media proporciona a su vez la salida promedio para este ejemplo.
A la hora de considerar en qué parte de un soporte queremos instalar nuestro sensor, hay que buscar el punto donde la resistencia del soporte sea máxima, de modo que la carga aplicada no sobrepase los límites de deformación del sensor. Por otro lado, nos interesa que esa zona de deformación sea lo más plana posible, para poder mantener el nivel de precisión.
Configuraciones
Existen una serie de configuraciones básicas para convertir un componente en un sensor activo. En una configuración de viga a flexión, tenemos una viga estructural a la que se le aplica una fuerza; pensemos, por ejemplo, en una viga con un voladizo. En el caso de una viga con un voladizo, tendremos una deformación positiva en la parte superior y una deformación negativa en la inferior. Este es el principio básico de un voladizo. En este ejemplo, podemos instalar dos sensores activos para medir tensión en la parte superior de la viga y otros dos sensores activos para medir compresión en la parte inferior. Los sensores se conectan formando un circuito de puente de Wheatstone, que proporciona una salida eléctrica proporcional a la fuerza aplicada. Aquí es necesario tener en cuenta si existe algún momento de torsión; es decir, si la fuerza no es una carga puntual sino una fuerza en movimiento. En este ejemplo no estamos haciendo nada para compensar la influencia de un momento de torsión, que podría introducir un efecto variable.
Otro ejemplo es una configuración de columna, que se utiliza en el caso de fuerzas o tensiones aplicadas a una columna o viga. Se emplearía un juego de sensores para medir la deformación axial y el efecto de Poisson. A continuación, se colocaría otro juego de sensores en el lado opuesto, y se conectarían entre sí para formar un puente de Wheatstone completo. En este caso, la tensión es equivalente a la fuerza a lo largo de la sección transversal en la que están montados los sensores. Cuando se mide el par en una pieza, un vástago u otro tipo de barra, nos encontramos con dos momentos en sentido opuesto, que producen una torsión en la barra. Esa torsión puede medirse a lo largo del eje central con un juego de sensores de cizallamiento, que miden las deformaciones a 45º que produce la aplicación del par. De nuevo, estos sensores pueden conectarse entre sí para crear un puente de Wheatstone completo y son el enfoque básico para medir el par.
El último principio es una configuración de cizallamiento de viga. Es similar a la viga en voladizo anterior solo que, en este caso, se utiliza un principio de cizallamiento en lugar de uno de flexión. Cuando se utiliza el principio de cizallamiento para medir la deformación asociada a la fuerza aplicada, los sensores se sitúan a lo largo del eje neutro de la viga, con lo que la configuración es insensible al momento de torsión. La fuerza puede moverse sin que las variaciones en la carga produzcan efectos adversos en la salida.
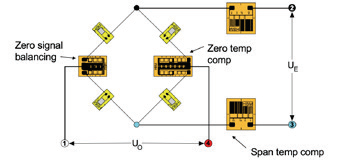
La configuración básica de un puente de Wheatstone se ilustra en la Figura 3 y recuerda a un campo de béisbol. El primer sensor activo se encuentra entre la posición del bateador y la primera base. Las dos polaridades siempre se configuran de modo que sean opuestas entres sí: dos tracciones opuestas entre sí o dos compresiones opuestas entre sí. Eso es lo que introduce un desequilibrio en el puente cuando se aplica la carga y, por tanto, una señal eléctrica que podemos medir. En la Figura 3 también se muestra la compensación de temperatura, que consiste en cancelar dentro del puente de Wheatstone el efecto de la dependencia del módulo de Young del material de soporte con la temperatura. La selección del material también es un factor muy importante. Por ejemplo, en un bastidor puede haber un elemento de fundición de hierro o de otro material no apto para convertirlo en un sensor por carecer de propiedades elásticas. En cambio, las aleaciones de acero, los aceros inoxidables y el aluminio sí que son materiales idóneos para crear sensores. A continuación, se puede aplicar una compensación que corrija la dependencia del módulo de Young con la temperatura. El módulo de Young varía con la temperatura, lo cual afecta a la lectura de deformación. Cuando se aplica una tensión eléctrica, el sistema de compensación se encarga de regular la corriente en el puente para enmascarar el efecto de la temperatura del material de soporte.
El otro aspecto al que se debe prestar atención es la compensación de temperatura del punto cero del puente. En este caso, lo que preocupa es el efecto directo de la temperatura sobre el circuito del puente; la solución consiste en incorporar un material diferente que compense ese cambio. El efecto neto es que no se produce ningún cambio en la señal cuando varía la temperatura. Así que, en el brazo opuesto del puente se monta una red de compensación de la señal del cero. Esta red está hecha del mismo material que las galgas extensométricas, que es una aleación de constantán. La red de corrección del cero se utiliza porque una vez que se colocan los medidores y se conectan los cables internos se puede producir un desequilibrio del cero. Esta red no atenúa la señal que llega al amplificador, simplemente aporta un método para ajustar la señal del cero en el circuito del puente. La puesta a cero del puente permite obtener la máxima resolución con el amplificador utilizado.
Cómo convertir un elemento estructural en un sensor
El cliente deseaba medir la carga con la máxima precisión posible y aplicando una compensación de temperatura, para evitar que las variaciones de temperatura afectasen a la señal. Por desgracia, el cliente no puede controlar cómo se aplica la carga. No está garantizado que la aplicación sea siempre lineal. Por tanto, la solución debía ser insensible a los momentos de torsión. Además, en este caso, las limitaciones de espacio no permitían instalar un sensor de catálogo.
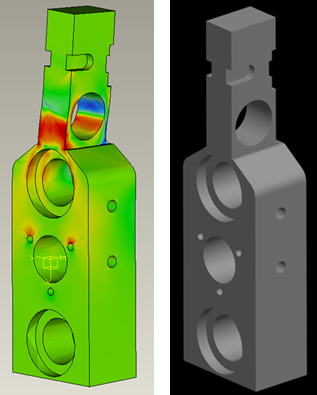
Aunque la figura no lo muestra, el espacio era demasiado reducido para montar un sensor, así que se identificó como posible solución el elemento coloreado en azul en la Figura 4. El primer paso consistió en obtener las cargas que iban a aplicarse al elemento, un dato que pudo proporcionarnos el cliente. A continuación determinamos cómo debilitar este elemento estratégicamente para favorecer flexiones; es decir, deformaciones susceptibles de ser medidas.
Para debilitar la pieza, practicamos un orificio pasante. De este modo, cuando se aplica la carga esperada se producen las flexiones que necesitamos. En la Figura 5, los colores indican tensiones positivas y negativas en el interior del orificio. Por tanto, fue posible crear un circuito de puente de Wheatstone completo dentro del orificio, utilizando galgas extensométricas lineales. Esta configuración resultó ser la óptima y permitió cumplir los requisitos de precisión del cliente. Además, dentro del orificio hay espacio suficiente para el circuito de compensación de temperatura.

La pieza ya existente estaba construida en un material estructural muy básico, no apto para ser utilizado en un sensor. Por ello, el material se cambió por otro con las características elásticas necesarias. Se llevaron a cabo varias iteraciones utilizando el método de análisis de elementos finitos (FEA), para determinar el tamaño de orificio más idóneo para transformar la pieza en un sensor activo viable.
La Figura 6 muestra la pieza final, fabricada en un material de aluminio con un tratamiento anodizado de protección. Se diseñó un sensor de puente completo con una salida del orden de milivoltios/voltio adaptado al espacio disponible. El conjunto del sensor es insensible a los momentos de torsión y lleva integrado un sistema de cancelación natural. La capacidad de carga de la nueva pieza equivale al 150% de la capacidad de la pieza original, sin deriva o movimiento del cero. A continuación, la pieza se sometió a un proceso de prototipado para simular las condiciones de carga reales. Seguidamente, superó las pruebas y se calibró.
Resumen
Inicialmente, el cliente esperaba encontrar un producto de catálogo que pudiera adaptarse a la pieza ya existente sin apenas modificaciones. Esa solución no era posible. Sin embargo, fuimos capaces de transformar un miembro estructural existente en un sensor activo operativo. Este sensor proporciona una señal eléctrica adecuada para la carga que se desea aplicar y eliminó la necesidad de introducir cambios en el sistema del cliente.
Autor
Randy Hopkins
Director de Sensores OEM de HBK