Posibles fuentes de error
En el contexto de los transductores de fuerza de galgas extensométricas, se puede distinguir entre dos grupos de errores:
- Errores independientes de la carga: son errores que no dependen de la fuerza aplicada; la señal del error es siempre la misma, con independencia de cuál sea el valor medido. Se calculan como un porcentaje de la fuerza nominal del transductor de fuerza.
- Errores en función de la lectura: son proporcionales a la fuerza aplicada en el momento de la observación; por tanto, pueden calcularse como un porcentaje del valor medido.
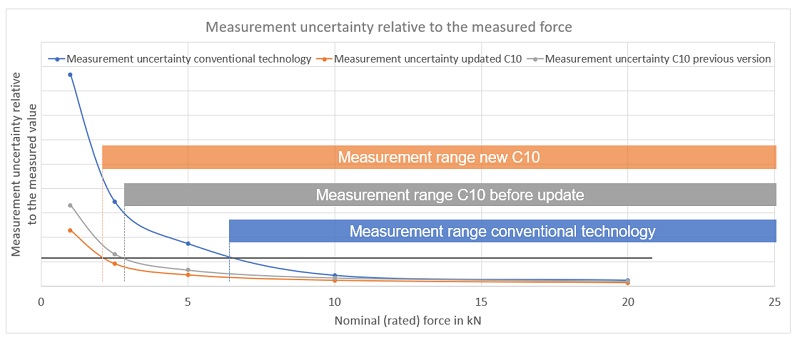
La influencia de la temperatura en el punto cero (TC0) es un ejemplo de error independiente de la carga. Esta desviación de la lectura tiene un valor absoluto específico que no guarda relación con la fuerza medida. Si consideramos esta fuente de error en relación con la señal de salida, la conclusión es que es un error especialmente acusado cuando solo se emplea un pequeño porcentaje de la fuerza nominal. Su valor absoluto siempre es el mismo, pero su influencia porcentual es mayor cuanto menor es la señal útil.
Por ejemplo, supongamos que en un transductor de fuerza típico con tecnología convencional para una fuerza nominal de 100 kN, el TC0 es del 0,5% por cada 10 kelvin.
Eso significa que una variación de temperatura de 10 K genera una contribución del 0,5% de la fuerza nominal a la incertidumbre de medida; es decir, una incertidumbre de 0,5 kN. Si el sensor de fuerza no se utiliza para medir 100 kN sino 20 kN, la incertidumbre de medida continúa siendo de 0,5 kN. Ahora bien, como la fuerza que se mide es más pequeña, la contribución a la incertidumbre de medida sería del 2,5%.
Veamos ahora la misma situación en el caso del sensor C10. Existe un modelo de la serie C10 con fuerza nominal de 100 kN. Sin embargo, su TC0 es tan solo del 0,075% por cada 10 kelvin.
Por tanto, el error es de 75 N y, al igual que en el ejemplo anterior, se mantiene constante a lo largo de todo el rango de medida. Si el moderno sensor C10 se utiliza a 20 kN, la parte de error debida al TC0 pasa del 2,5% (tecnología convencional) a tan solo el 0,375%.
Aparte del TC0, el error de linealidad también se refiere al fondo de escala. Por tanto, las consideraciones anteriores le son igualmente aplicables.
En cambio, los errores referidos al valor efectivo se calculan con respecto a la señal instantánea aplicada. Esas fuentes de error incluyen, por ejemplo, la dependencia de la sensibilidad con la temperatura (TCS), la fluencia e incluso la tolerancia de una calibración.
Para evaluar el error total, es preciso efectuar la suma geométrica de cada error individual, lo que significa que para mejorar de forma significativa la precisión de medida es indispensable reducir los errores individuales más importantes. En muchos casos, el TC0, la linealidad y la histéresis son de vital importancia. Como esos errores —como ya se ha dicho— dependen del fondo de escala (o sea, la señal de salida cuando se utiliza toda la fuerza nominal), cualquier mejora de esos parámetros resultará especialmente efectiva. Además, permitirá utilizar el transductor de fuerza en el llamado "rango de carga parcial" (es decir, cuando solo se utiliza una parte de la fuerza nominal).