
- Cada módulo es un sistema de adquisición de datos.
- Móvil y autónomo, para pruebas de vehículos.
- Se integra en bancos de ensayos en tiempo real.
- Portátil, para trabajos de soporte.
- Instalación permanente en aplicaciones de monitorización.
QuantumX: el sistema de adquisición de datos universal y distribuible
El sistema de adquisición de datos QuantumX es la herramienta perfecta para todas sus necesidades de pruebas y medición. Es la solución ideal para adquirir de manera fiable datos de magnitudes físicas y tecnologías de sensores muy variadas. Y tiene una capacidad imbatible para adquirir información de cualquier sensor o señal.
Flexible
Fiable
- Lleva 10 años en el mercado y lo utilizan miles de clientes.
- Tecnología patentada de alta exactitud de medida.
- Estabilidad a largo plazo y certificado de calibración integrado.
Fácil de usar
- Pequeño y portátil.
- Manejo intuitivo desde el software catman de HBM.
- Abierto a numerosas plataformas de software: LabView, Visual Studio .NET, DIAdem, CANape, DASYlab…
Una cadena de medida fiable
El sistema de adquisición de datos QuantumX es universal, fiable y muy preciso. Se puede combinar perfectamente con sensores de HBM y con el software catman para construir soluciones completas de pruebas y medición. Desde el sensor al software. Tan sencillo como “conectar y medir”.

Aplicaciones versátiles
 Bancos de ensayo y laboratorios
Bancos de ensayo y laboratorios
- Ensayos de resistencia estructural
- Pruebas de motores y cadenas cinemáticas en bancos dinamométricos
- Ensayos de componentes y sistemas mecánicos y eléctricos
- Análisis de aerodinámica / pruebas en túnel de viento
 Adquisición de datos móvil
Adquisición de datos móvil
- Adquisición móvil de cargas sobre componentes mecánicos en vías o carreteras en mal estado
- Ensayos de dinámica de vehículos (marcha y maniobrabilidad)
- Pruebas de frenos y de aceptación
- Monitorización de vehículos o vías
 Pruebas de aeronaves
Pruebas de aeronaves
- Ensayos de resistencia estructural / fatiga
- Ensayos de propulsión (empuje, rendimiento, resistencia)
- Pruebas de “pájaro de hierro”
- Pruebas de impactos: ensayos de caída e impactos (pájaros, drones)
- Análisis del centro de gravedad
 Motores eléctricos y almacenamiento de energía
Motores eléctricos y almacenamiento de energía
 Servicio/Mantenimiento
Servicio/Mantenimiento
- Calibración de máquinas
- Investigación y diagnóstico de defectos
 Monitorización de salud de infraestructuras
Monitorización de salud de infraestructuras
Historias y testimonios de clientes

Sikorsky, del grupo Lockheed Martin, y HBM han completado la revisión de capacidad operacional (ORR) del nuevo sistema de adquisición de datos GEN6, que entra ahora oficialmente en producción.
Este nuevo GEN6 se basa en el sistema de adquisición de datos universal y distribuido QuantumX, de HBM, y se ha desarrollado en estrecha colaboración con el cliente. Desde ahora, los laboratorios de Sikorsky dispondrán de nueva funcionalidad de adquisición, manipulación y almacenamiento de datos.

"En nuestro proceso de selección ya habíamos reducido la lista de candidatos a cuatro sistemas amplificadores. Una evaluación práctica nos hizo decidirnos por el QuantumX de HBM, fundamentalmente por su incertidumbre de medida extremadamente baja”.
Bruno Kanzenbach, ingeniero sénior de Toyota Motorsport GmbH (TMG)

“Hemos seleccionado QuantumX porque se le puede conectar cualquier equipo con facilidad y porque tiene una capacidad de registro excelente, tanto en términos de duración de la grabación como de frecuencia de muestreo”.
Matt Williams, ingeniero sénior de ensayos estructurales, Agusta Westland

Comparativa entre módulos QuantumX
Busque y compare los módulos QuantumX que necesite, pulsando en la imagen de la derecha.
Seleccione el módulo de medida o sistema más adecuado a sus necesidades, según el número de canales, la frecuencia de muestreo, el tipo de señal (tensión, corriente), el tipo de galgas extensométricas, etc.
Una vez que haya localizado el producto más idóneo, consulte la página del modelo en cuestión para más información.
Pulse en la imagen de la derecha para ampliarla.
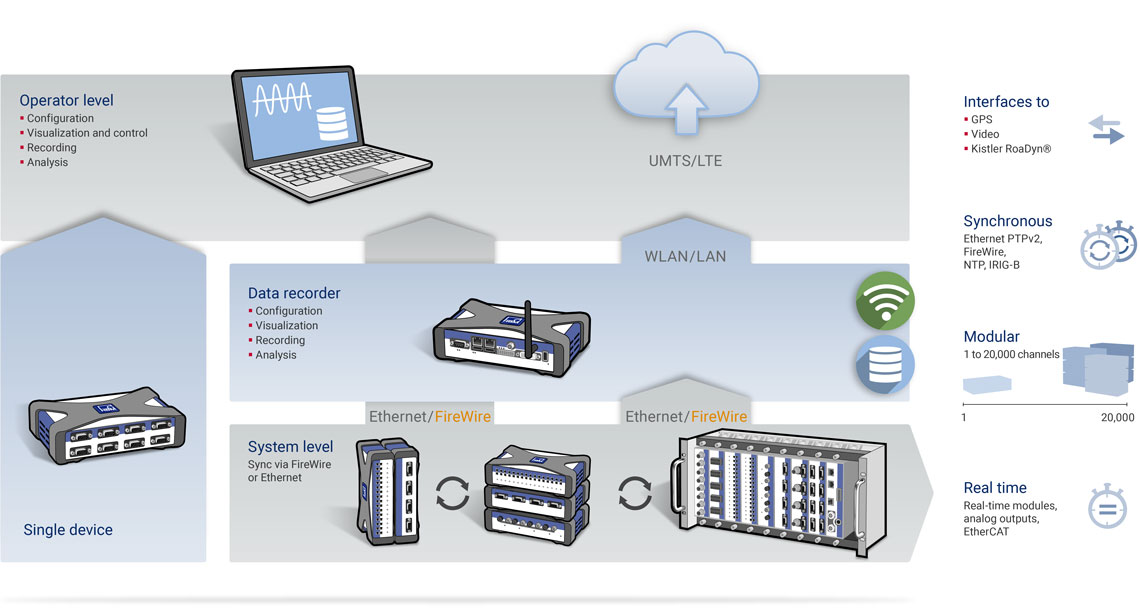
Concepto modular
- Solo tiene que conectar un módulo a su PC y empezar a trabajar.
- Puede distribuir varios módulos e instalarlos cerca de los puntos de medición y los sensores.
- Conecte cientos de canales de forma centralizada, para aplicaciones que requieran alta densidad de canales.
- Utilice el potente registrador de datos en sus ensayos móviles autónomos, e intégrelo en la nube.
- Integración en tiempo real en bancos de ensayos automatizados.
- Diseñe su propio ensayo, con estimulación de señal en tiempo real.
- Integre cualquier sensor y transfiera sus lecturas digitales a través de CAN o de salidas de tensión analógicas (pasarela).
Módulos QuantumX
Amplificadores universales MX440B y MX840B
Amplificador universal de 4 u 8 canales de la familia QuantumX
Compatible con las siguientes tecnologías de transductores:
- Galgas extensométricas de puente completo o de medio puente (CC o frecuencia portadora de 4,8 kHz)
- Circuitos de cuarto de puente de galgas extensométricas con adaptador
- Transductores piezoeléctricos alimentados por corriente (IEPE / ICP®)
- Piezorresistivos, de puente completo
- Termómetros de resistencia (PT100 / PT1000)
- Termopares (tipos K, N, R, S, T, B, E, J, C)
- Resistencias óhmicas
- Transductores potenciométricos
- Inductivos, LVDT, de puente completo o de medio puente
- Tensión (± 100mV, ± 10V, ± 60V) y corriente (0 / 4 … 20 mA, 2, 3, o 4 hilos)
- Canales 5-8, adicionalmente: frecuencia, contador, codificador rotatorio, SSI
- Bus CAN
Más información HBMshop Calibre su módulo
![]()
Amplificador para puentes de galgas extensométricas MX1615B/MX1616B
Amplificador para puentes de galgas extensométricas de 16 canales de la familia QuantumX
Compatible con las siguientes tecnologías de transductores:
- Puente completo o medio puente de galgas extensométricas (CC o frecuencia portadora de 1200 Hz)
- Cuarto de puente de galgas extensométricas (CC o frecuencia portadora de 1200 Hz, resistencias de terminación de 120/350/1000 Ω)
- Tensión (±10 V)
- Termómetros de resistencia (Pt100)
- Resistencia
- Transductores potenciométricos
Más información HBMshop Calibre su módulo
![]()
Amplificador universal MX410B
Amplificador universal altamente dinámico de 4 canales de la familia QuantumX
Compatible con las siguientes tecnologías de transductores:
- Puente completo o medio puente de galgas extensométricas (CC o frecuencia portadora de 4,8 kHz)
- Circuitos de cuarto de puente de galgas extensométricas con adaptador
- Transductores piezoeléctricos alimentados por corriente (IEPE, ICP)
- Piezorresistivos, de puente completo
- Puentes completos o medios puentes inductivos
- Tensión (±10 V)
- Corriente (0 / 4 ... 20 mA, 2, 3 o 4 hilos)
- Salidas de tensión analógicas (±10 V)
Más información HBMshop Calibre su módulo
![]()
Módulo de medida de frecuencia e impulsos MX460B
Módulo digital altamente dinámico de 4 canales de la familia QuantumX para adquisición de par, velocidad de rotación, ángulo, posición y desplazamiento
Compatible con las siguientes tecnologías de transductores:
- Entradas digitales de frecuencia de alta resolución (por ejemplo, bridas medidoras de par de HBM)
- Contador de impulsos, codificador incremental, codificador
- Sensores de velocidad de rotación pasivos inductivos (acoplamiento de CA)
- Señales PWM (modulación de ancho de impulso)
Más información HBMshop Calibre su módulo
![]()
Amplificador para puentes completos MX430B
Módulo de medida de 4 canales para puentes de la familia QuantumX, para medición precisa de transductores basados en puentes completos de galgas extensométricas (dinámicos, estáticos)
Compatible con las siguientes tecnologías de transductores:
- Puente completo de galgas extensométricas (CC o frecuencia portadora de 600 Hz)
Más información HBMshop Calibre su módulo

Amplificador de medida de precisión MX238B
Módulo de medida de precisión de 2 canales de la familia QuantumX, para medición de transductores basados en puentes completos de galgas extensométricas
Compatible con las siguientes tecnologías de transductores:
- Puente completo de galgas extensométricas (frecuencia portadora de 225 Hz)
Más información HBMshop Calibre su módulo
![]()
Amplificador universal MX1601B
Amplificador de 16 canales de la familia QuantumX
Compatible con las siguientes tecnologías de transductores:
- Transductores piezoeléctricos alimentados por corriente (IEPE, ICP)
- Tensión (±100 mV, ±10 y ±60 V)
- Corriente (0/4 ... 20 mA, 2, 3 o 4 hilos)
Más información HBMshop Calibre su módulo
![]()
Amplificador para termopares MX1609
Amplificador para termopares de 16 canales de la familia QuantumX
Compatible con las siguientes tecnologías de transductores:
- Termopares tipo K (MX1609KB)
- Termopares tipo T (MX1609TB)
Más información HBMshop Calibre su módulo
![]()
Amplificador para termopares aislados MX809B
Amplificador de 8 canales para termopares de la familia QuantumX, para mediciones aisladas y fiables con termoelementos en entornos eléctricos
Compatible con las siguientes tecnologías de transductores:
- Termopares tipo K, J, T, B, E, N, R, S y C con punto de medición de comparación interno para cada canal
- Tensión (±5 V)
Más información HBMshop Calibre su módulo
 Módulo para tensión aislada MX403B
Módulo para tensión aislada MX403B
Módulo de 4 canales para medida de tensiones eléctricamente aisladas, de la familia QuantumX
Compatible con las magnitudes siguientes:
- Tensión (10, 100 y 1000 V)
- Categorías de medición: 1250 V (no CAT), 1000 V CAT II, 600 V CAT III
Más información HBMshop Calibre su módulo
 Módulo interrogador óptico MXFS
Módulo interrogador óptico MXFS
Módulo de 128 canales para integrar medidas ópticas o eléctricas en su cadena de medida QuantumX
- Puede trabajar como módulo independiente o sincronizado con otros módulos QuantumX
- 128 canales por módulo: máxima densidad de sensores y excelente eficacia de costes
- Frecuencias de adquisición seleccionables: se adapta a numerosas aplicaciones
- Robusto y estable
- Integrado con el software catman® pero abierto a otros programas

Módulo CAN FD / CAN clásico MX471C
Módulo CAN de 4 canales compatible con CAN FD o CAN clásico
- Recepción: Adquisición de mensajes y señales CAN con sincronización temporal (decodificación incorporada)
- Recepción: Adquisición de mensajes en bruto de la totalidad del tráfico a través del bus CAN y decodificación basada en PC
- Recepción: Escalable hasta un número ilimitado de módulos, por ejemplo, con 20 nodos CAN en total
- Transmisión: Envío de cualquier señal de medida analógica adquirida, por ejemplo, con el módulo MX1615B o con cualquier otro módulo
- Gateway: Gateway CAN FD / CAN con reempaquetado de mensajes
- Gateway: Envío de todos los datos procedentes de módulos directamente conectados a través de Ethernet y, opcionalmente, con sincronización temporal mediante PTPv2
- Resistencia interna de terminación, conmutable
![]()
Registrador de datos CX22B-W
CX22B-W es el registrador de datos perfecto:
- Almacenamiento de datos interno de todas las señales de los módulos QuantumX/SomatXR conectados
- Grabación autónoma en un formato de datos robusto, con exportación a otros formatos
- Funcionalidad de pasarela (LAN, WLAN) con el PC
- Potente capacidad de cálculo y análisis de señales (contador, FFT, potencia eléctrica y cálculos de eficiencia)
- Impresionantes opciones de visualización
- Integración de cámaras (foto, vídeo), posición (GPS/GNSS), ruedas dinamométricas, estación meteorológica
- Alarmas/notificaciones de estado de la señal y el sistema
- Control sencillo (pantalla táctil, control remoto o teclado directamente conectado)

Módulo gateway CX27C
El gateway CX27C ofrece opciones de integración sencillas:
- Conexión de su sistema QuantumX a un PC a través de un enlace Ethernet. De este modo, permite adquirir y analizar todos los datos con el software catman Easy/AP, utilizando la máxima frecuencia de muestreo posible.
- Conexión de un sistema QuantumX a cualquier software CAL instalado en un PC, mediante xCP-on-Ethernet.
- En paralelo, integración de su sistema QuantumX o SomatXR en tiempo real con su red EtherCAT™ o PROFINET IRT, con fines de control, automatización o, simplemente, monitorización. Es posible escalar varios CX27C en un mismo sistema de adquisición de datos.
MMódulo CAN FD / CAN clásico MX471C
Módulo CAN de 4 canales compatible con CAN FD o CAN clásico
- Recepción: Adquisición de mensajes y señales CAN con sincronización temporal (decodificación incorporada)
- Recepción: Adquisición de mensajes en bruto de la totalidad del tráfico a través del bus CAN y decodificación basada en PC
- Recepción: Escalable hasta un número ilimitado de módulos, por ejemplo, con 20 nodos CAN en total
- Transmisión: Envío de cualquier señal de medida analógica adquirida, por ejemplo, con el módulo MX1615B o con cualquier otro módulo
- Gateway: Gateway CAN FD / CAN con reempaquetado de mensajes
- Gateway: Envío de todos los datos procedentes de módulos directamente conectados a través de Ethernet y, opcionalmente, con sincronización temporal mediante PTPv2
- Resistencia interna de terminación, conmutable
Más información HBMshop Calibre su módulo
Módulo interrogador óptico MXFS
Módulo de 128 canales para integrar medidas ópticas o eléctricas en su cadena de medida QuantumX
- Puede trabajar como módulo independiente o sincronizado con otros módulos QuantumX
- 128 canales por módulo: máxima densidad de sensores y excelente eficacia de costes
- Frecuencias de adquisición seleccionables: se adapta a numerosas aplicaciones
- Robusto y estable
- Integrado con el software catman® pero abierto a otros programas
![]()
Módulo de salida analógica MX878B
Módulo de 8 canales para salida de tensiones analógicas dentro de la familia QuantumX
El módulo ofrece las siguientes posibilidades:
- 8 salidas de tensión analógicas (±10V), para salida en tiempo real de toda clase de entradas de sensores
- Cálculos en tiempo real (matriz, PID, alarmas, etc.)
- Salida con perfiles definidos (armónico o arbitrario)
- Control directo desde PC
Más información HBMshop Calibre su módulo
![]()
Módulo de E/S múltiple MX879B
Módulo de E/S múltiple de la familia QuantumX, para salida de tensiones analógicas y entrada/salida digital dentro de la familia QuantumX
El módulo ofrece las siguientes posibilidades:
- 8 salidas de tensión analógicas (±10V), para salida en tiempo real de toda clase de entradas de sensores
- 32 entradas/salidas digitales (5 V, 24 V, hasta 500 mA)
- Cálculos en tiempo real (matriz, PID, alarmas, etc.)
- Salida con perfiles definidos (armónico o arbitrario)
- Control directo desde PC
Más información HBMshop Calibre su módulo
Módulo CAN FD / CAN clásico MX471C
Módulo CAN de 4 canales compatible con CAN FD o CAN clásico
- Recepción: Adquisición de mensajes y señales CAN con sincronización temporal (decodificación incorporada)
- Recepción: Adquisición de mensajes en bruto de la totalidad del tráfico a través del bus CAN y decodificación basada en PC
- Recepción: Escalable hasta un número ilimitado de módulos, por ejemplo, con 20 nodos CAN en total
- Transmisión: Envío de cualquier señal de medida analógica adquirida, por ejemplo, con el módulo MX1615B o con cualquier otro módulo
- Gateway: Gateway CAN FD / CAN con reempaquetado de mensajes
- Gateway: Envío de todos los datos procedentes de módulos directamente conectados a través de Ethernet y, opcionalmente, con sincronización temporal mediante PTPv2
- Resistencia interna de terminación, conmutable
Software de adquisición de datos catman
El software catman de HBM es el complemento perfecto para QuantumX y SomatXR. catman ofrece excelentes opciones de visualización de los sensores y los datos digitales, almacena los datos en un robusto formato binario, puede automatizarse, analiza datos sobre la marcha o en modo de posprocesado, y genera informes de pruebas
- Visualización de los datos de medición.
- Análisis en línea, gracias a una potente biblioteca matemática.
- Almacenamiento y exportación de datos en distintos formatos
- Análisis de datos.
- Elaboración de informes.

QuantumX le proporciona accesorios complementarios para sus proyectos y aplicaciones de medición.
Vídeo y folleto de QuantumX
Este vídeo presenta las numerosas funciones que ofrece QuantumX.
Este vídeo explica cómo utilizar nuestro software catman Enterprise para parametrizar y visualizar un gran número de canales de medición.