Descripción del banco de pruebas
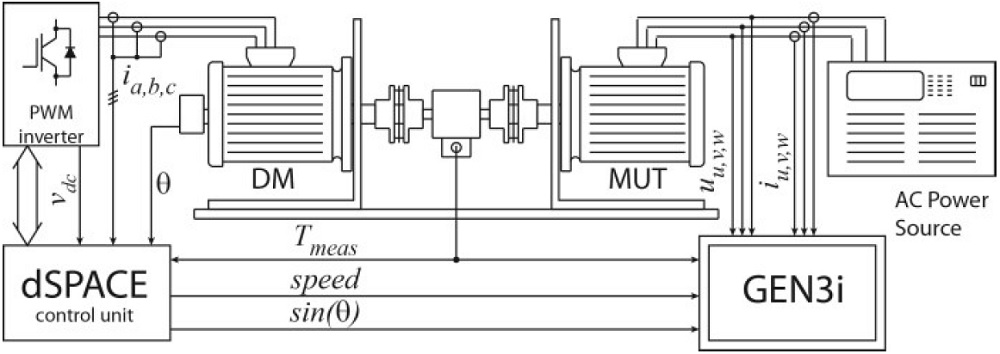
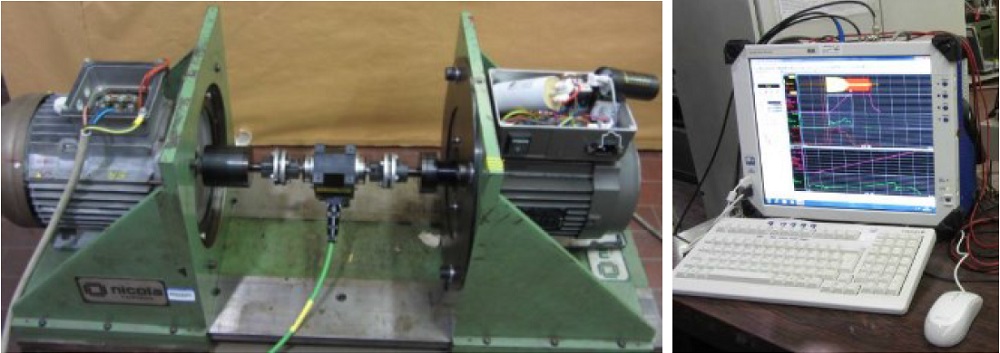
El banco de pruebas propuesto es bastante complejo y tiene varias partes, tal y como se puede apreciar en el esquema de la fig.1. El MUT y el DM están instalados sobre soportes mecánicos mediante placas verticales. Sus ejes están acoplados mediante un transductor de par, como se muestra en el lado izquierdo de la fig.2. Evidentemente, la estructura mecánica y los acopladores deben ser capaces de soportar las tensiones mecánicas que se generan durante los ensayos. La señal de par medida se registra con fines de medición, pero también se transmite al sistema de control de velocidad del DM, según se describe en la siguiente sección. Las principales características del medidor de par empleado (vibrómetro TM208) son: par nominal de 20 Nm, par de sobrecarga 40 Nm, precisión del 0,1% y ancho de banda de 1 kHz.
El DM puede ser cualquier equipo capaz de proporcionar el par y la velocidad necesarios para las pruebas. En el banco de pruebas propuesto, el DM es un motor de reluctancia síncrono (SyncRel) de 2,2 kW, que entrega un par de 14 Nm a 1500 rpm, alimentado por un inversor PWM con capacidad de frenado. La velocidad del DM se controla a través una unidad de control dSPACE DS1104. El motor objeto del ensayo recibe tensión a través de una fuente de alimentación sinusoidal, que permite regular la tensión durante algunas de las pruebas.
El núcleo del banco de pruebas es el sistema de adquisición de datos dado por el registrador de datos GEN3i, de HBM, que se muestra en la fig. 2 (derecha). El registrador de datos GEN3i permite registrar de forma síncrona 12 canales aislados con una adquisición de datos en continuo de 2 MS/s. Gracias a esta impresionante frecuencia de muestreo en continuo y a la precisión de medición es posible registrar datos durante periodos prolongados sin que se pierda ninguna información asociada a periodos cortos o transitorios.
El registrador de datos GEN3i mide las siguientes magnitudes:
- Corrientes de fase iUVW y tensiones uUVW del MUT;
- Par del eje, velocidad y señal de sincronización sinϑ (las dos últimas señales proceden del sistema dSpace).
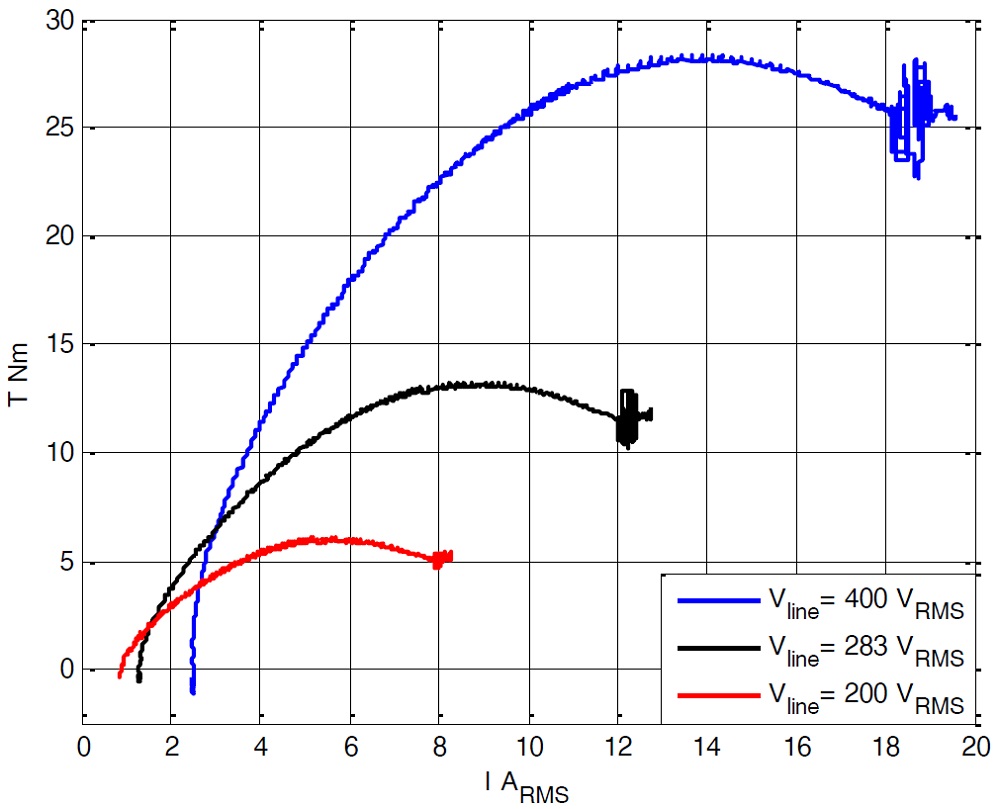
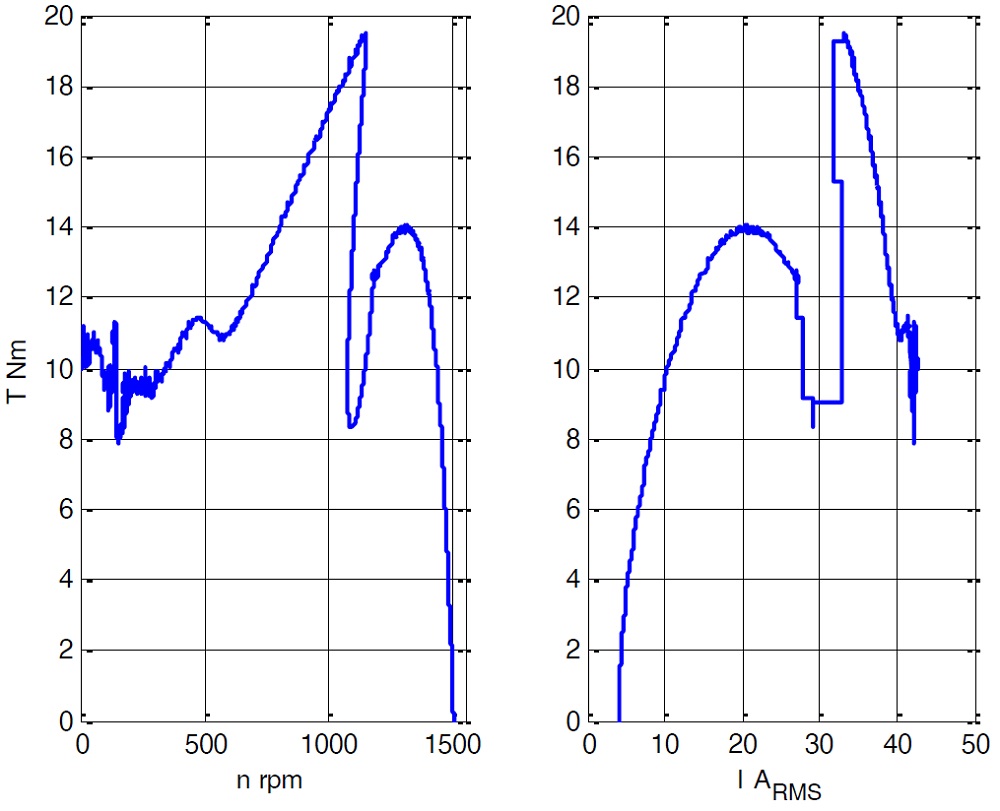
Como ejemplo de las posibilidades de este sistema de adquisición de datos de alta velocidad, en la fig. 3 se muestran algunas de las magnitudes eléctricas y mecánicas adquiridas que son necesarias para determinar la característica de par vs. velocidad en un motor de inducción trifásico.
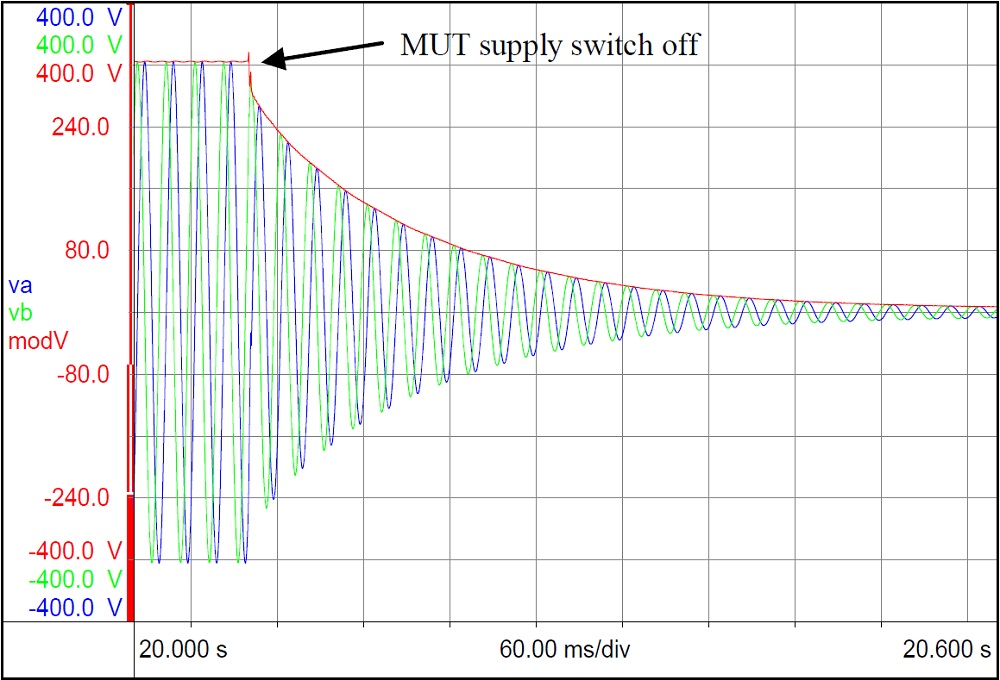
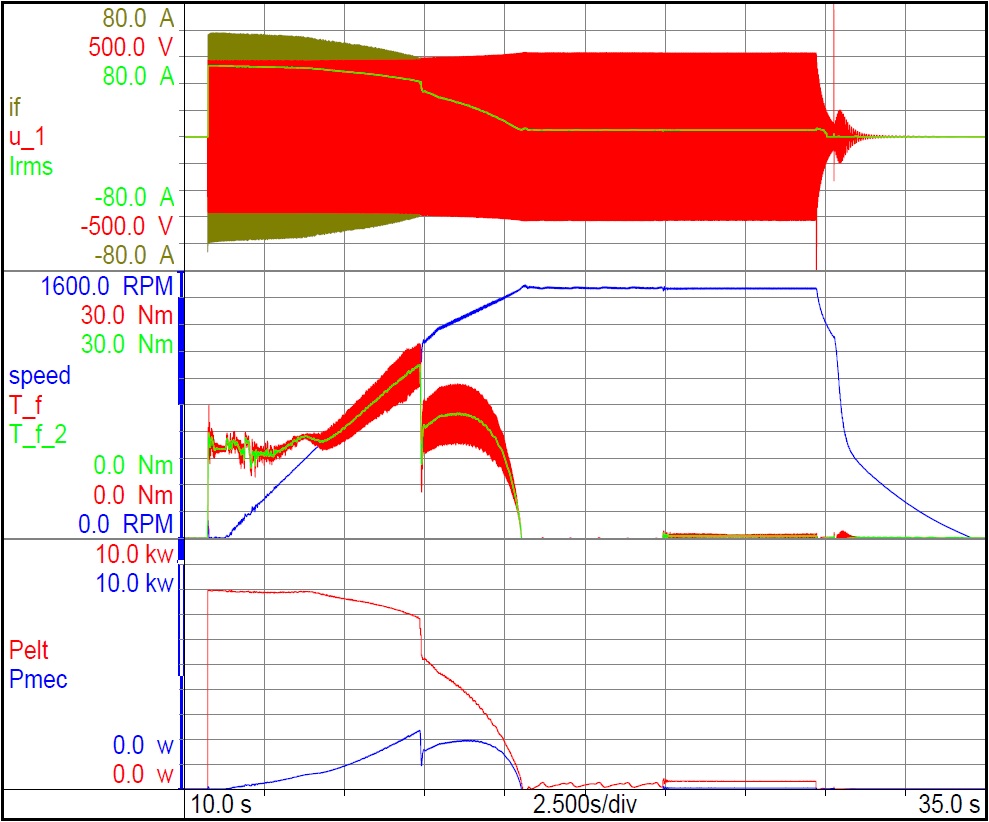
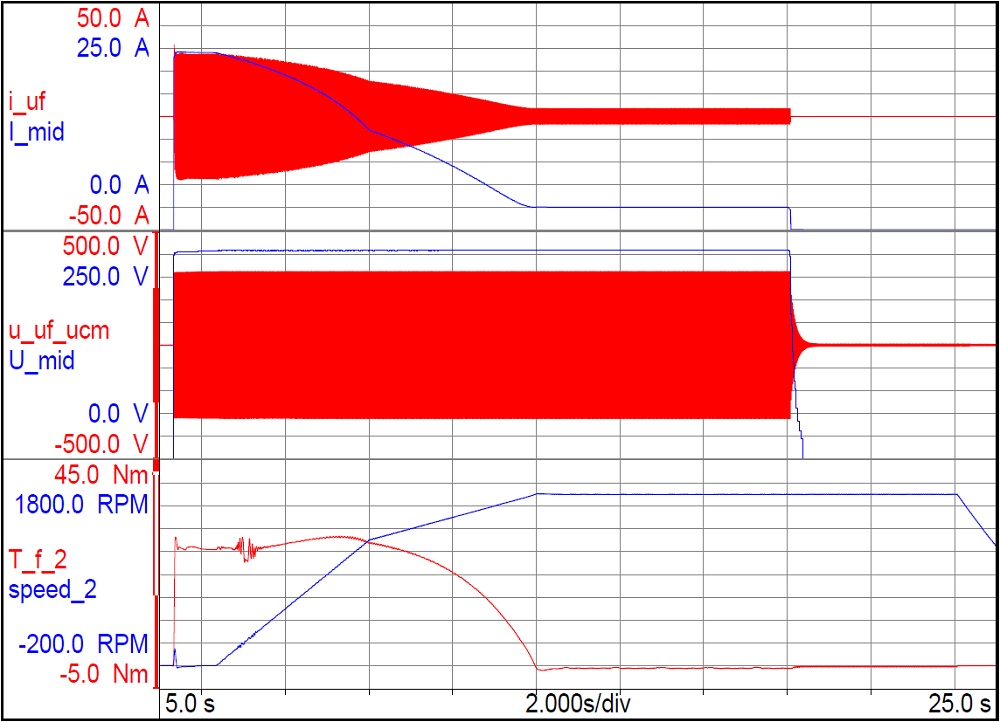
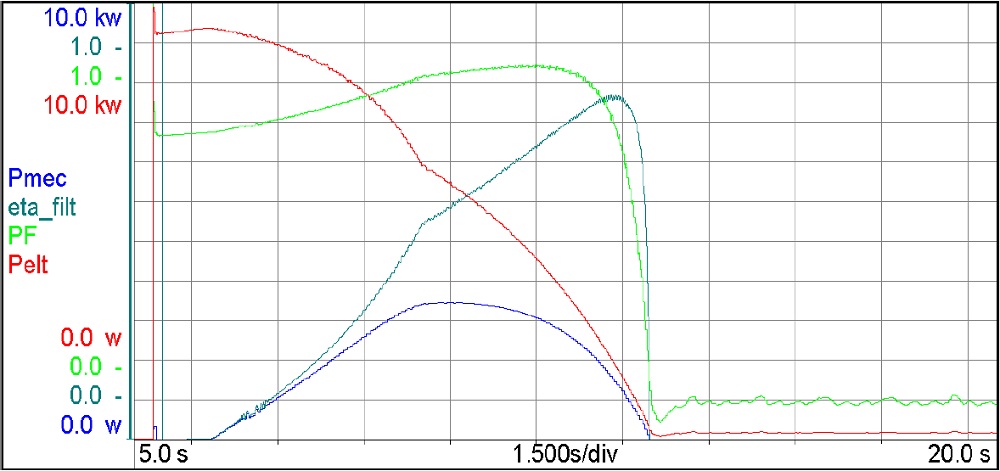
IAdemás de la adquisición de alta velocidad, el registrador de datos ofrece numerosas funciones de filtrado de datos y cálculos matemáticos. A la vista de la cantidad de datos que se gestionan, estas funciones son imprescindibles para extraer las magnitudes filtradas deseadas directamente del sistema de adquisición [8]. En la fig. 4 se muestran, a modo de ejemplo, algunas magnitudes calculadas durante el arranque de un motor de inducción trifásico. Para obtener buenos resultados, el sistema de adquisición de datos de alta velocidad debe combinarse con un sistema DM con una excelente dinámica, con el fin de aplicar carga al MUT. Por este motivo, en la siguiente sección se presentan y explican en detalle las características y el rendimiento del DM.