La Universidad de Geisenheim (Alemania) ha desarrollado un nuevo concepto de mecanización del trabajo agrícola en pendientes pronunciadas: el robot viticultor "Geisi". Geisi es capaz de trabajar en pendientes de hasta el 70%, por control remoto y sin cuerdas.
La viticultura en pendientes pronunciadas ha dado forma al paisaje de las regiones vinícolas de Alemania. Sin embargo, la superficie de cultivo en este tipo de terrenos no deja de disminuir. En 2010, ya solo representaba el 9% de la superficie total cultivada. Una de las razones es que, en los terrenos en fuerte pendiente, todas las labores deben realizarse de forma completamente manual: un trabajo peligroso, físicamente exigente y caro. El Instituto de Tecnología de la Universidad de Geisenheim quiere poner remedio a esta situación y facilitar esa viticultura en los terrenos en pendiente que tanta personalidad da al paisaje.
Un equipo dirigido por el Profesor Schwarz decidió desarrollar un nuevo concepto de labor mecanizada en pendientes pronunciadas: el robot viticultor Geisi. A diferencia de los equipos de cultivo mecanizado existentes hasta ahora, Geisi es capaz de trabajar en pendientes de hasta el 70%, por control remoto y sin cuerdas. Esto supone un importante ahorro de costes de mano de obra, al tiempo que mejora notablemente la seguridad laboral.
A largo plazo, este incansable viticultor robotizado, experto en trabajos en terrenos abruptos, podrá llevar a cabo de forma autónoma tareas típicas, como aplicación de pesticidas, cobertura del suelo o trabajos de poda. Y aún hay más: Geisi tendrá un precio considerablemente inferior al de los sistemas mecanizados actualmente disponibles para los cultivos en pendiente pronunciada.
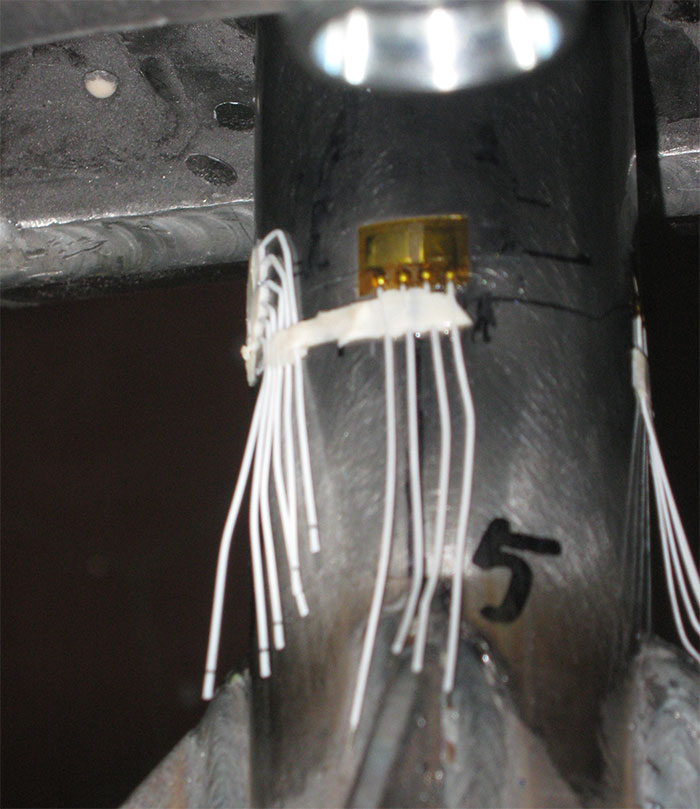
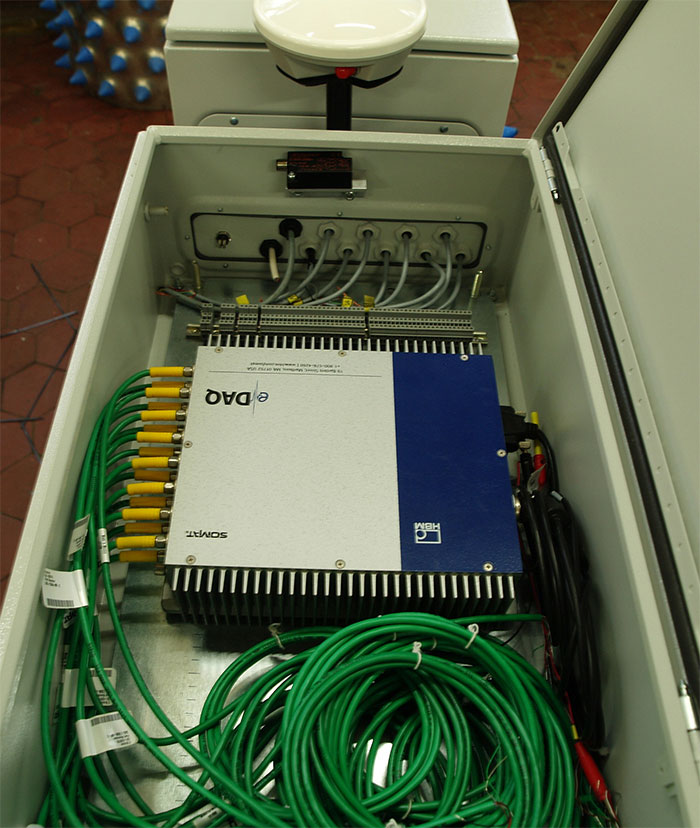
Para convertir estos objetivos en una realidad, los directores del proyecto quisieron contar con la participación de HBM Test and Measurement. Las galgas extensométricas y el robusto sistema de adquisición de datos Somat eDAQ móvil de HBM ayudaron decisivamente a que Geisi pudiera desplazarse a lo largo de fuertes pendientes de forma autónoma y fiable.