Creación de un canal de cálculo en PMX
Lo primero que hay que hacer es crear un nuevo canal de cálculo, denominado “rotation synchronous filter”, en la categoría “Analysis”.
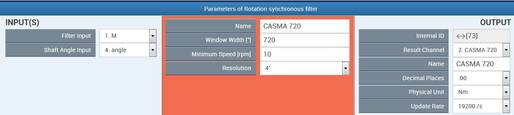
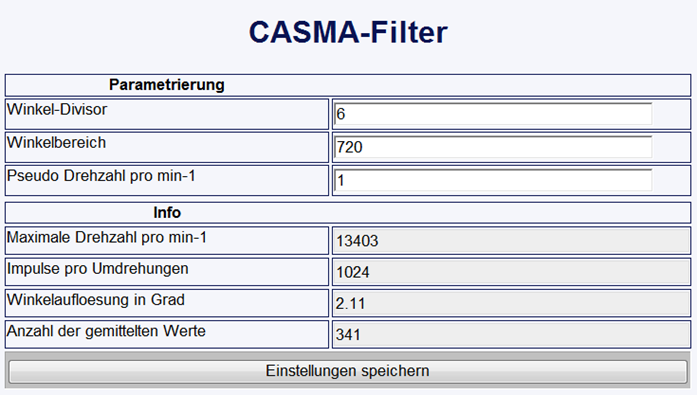
Ajuste de parámetros
- Entrada del filtro: indique la señal que desea filtrar.
- Entrada del ángulo del eje: indique la señal del ángulo del sensor de rotación. Los valores medidos deben estar comprendidos entre 0° y 360°.
- Anchura de la ventana: especifique el intervalo de cálculo del promedio móvil. La anchura debe estar comprendida entre 30° y 720°. El valor de ajuste por defecto es 180°. El cociente entre la anchura de la ventana y la resolución debe ser, como mínimo, 180.
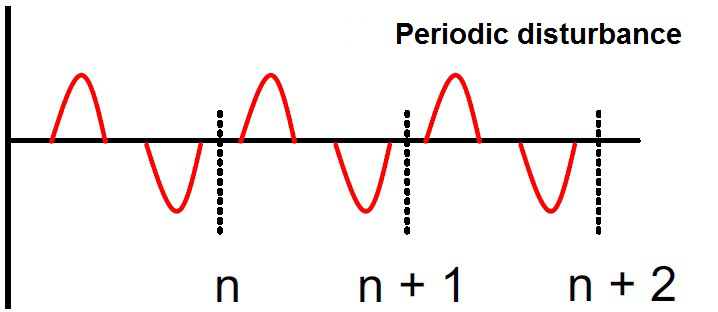
La anchura de la ventana se puede determinar experimentalmente de forma sencilla proyectando el periodo de tiempo de la perturbación con respecto al ángulo de rotación (ver captura de pantalla). En el ejemplo, existe una perturbación periódica cada 720°.

- Velocidad mínima: se trata de una velocidad de rotación virtual que se aplica cuando la velocidad de rotación activa es inferior a la velocidad de rotación definida.
- Resolución: este valor determina con qué frecuencia (es decir, cada cuántos grados) se calcula un nuevo promedio. La velocidad de rotación máxima admisible depende de este valor, puesto que la velocidad de cálculo viene dada por esta frecuencia de actualización general.
El valor teórico se obtiene de la fórmula: Velocidad de rotación máxima = resolución * frecuencia de actualización / 6.
Por razones prácticas, no deben utilizarse valores superiores al 10-20% de esta velocidad de rotación máxima que teóricamente es posible.
Resolución | Velocidad de rotación máxima teórica para una frecuencia de actualización de 19.200 Hz | Velocidad de rotación máxima teórica para una frecuencia de actualización de 38.400 Hz |
1° | 3200 rpm | 6400 rpm |
2° | 6400 rpm | 12,800 rpm |
4° | 12.800 rpm | 25.600 rpm |
6° | 19.200 rpm | 38.400 rpm |
8° | 25.600 rpm | 51.200 rpm |
Los siguientes múltiplos de la velocidad de rotación se suprimen en función de la anchura de la ventana:
Anchura de la ventana | Múltiplos |
90° | 4, 8, 12, … |
120° | 3, 6, 9, … |
180° | 2, 4, 6, … |
360° | 1, 2, 3, … |
720° | 0, 5, 1, 1, 5, … |
Nota: Si una de las fuentes de señal no es válida, la señal de salida tampoco será válida.
El filtro CASMA en acción
En el diagrama de más abajo se presenta en rojo la señal de par sin filtrar. La señal filtrada mediante el filtro CASMA se presenta en verde.
Se aprecia claramente que el filtro CASMA produce una excelente estabilización de la medida de par, en correlación con la velocidad del motor, que también varía a lo largo del tiempo. Cuanto mayor es la amplitud del filtro, mejores son los resultados.