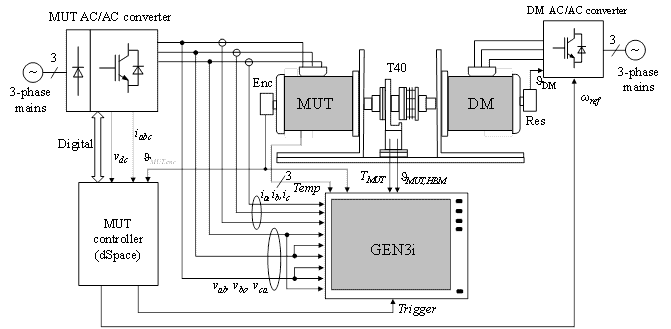
El banco de pruebas empleado para elaborar mapas de eficiencia y pérdidas se muestra en la Fig. 1 y se compone de los elementos principales siguientes:
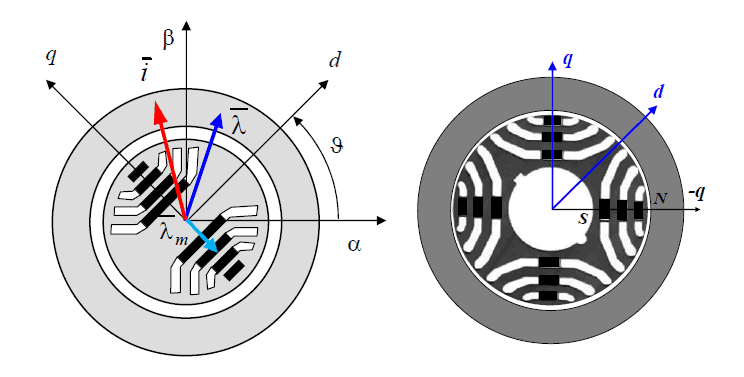
- El motor objeto de ensayo (motor under test, MUT) es un motor de imanes permanentes internos (IPM).
- El controlador del motor es una placa dSpace con una interfaz analógica/digital específica.
- El motor de accionamiento (driving motor, DM) es un motor de imanes permanentes (PM) controlado por velocidad. Recibe alimentación de un convertidor bidireccional cuya referencia de velocidad procede de la placa dSpace, a través de una salida analógica de la placa DAC (convertidor digital-analógico). Otra solución consiste en utilizar una interfaz CAN o RS422, dependiendo de la capacidad de comunicación del convertidor que suministra al DM.
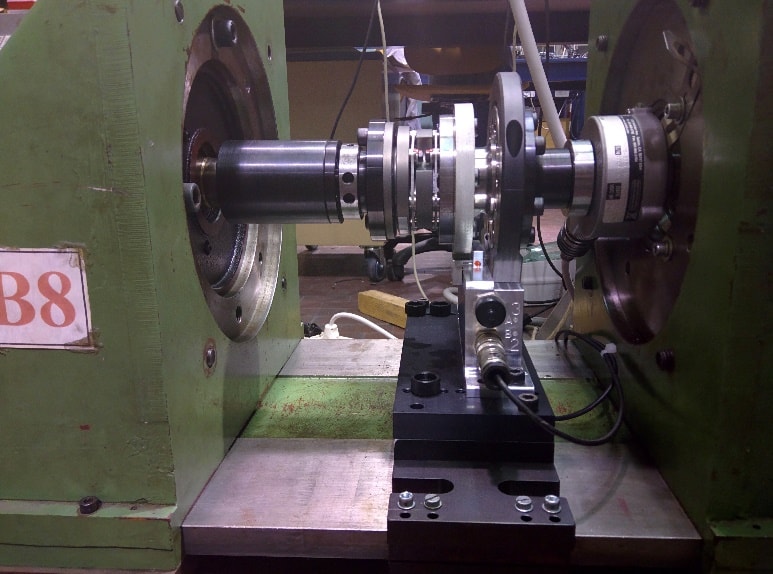
- El par se mide empleando un sensor de par T40 de HBM de alta precisión (Fig. 2). Este sensor mide el par en el eje y la posición del eje con una resolución de 1024 impulsos por revolución (salidas tipo codificador). El sensor de par se monta como un acoplamiento mecánico entre el eje del MUT y el eje del DM. Los datos se transmiten al sistema de medición mediante un transformador rotativo.
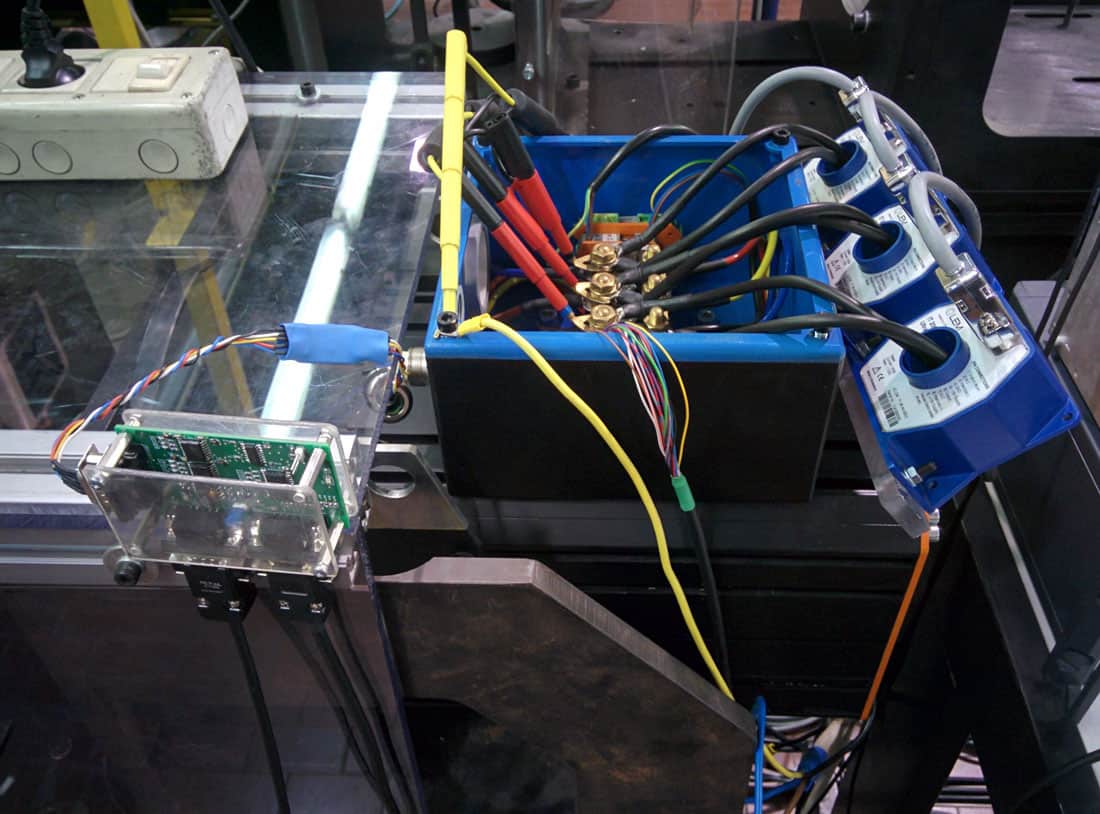
- Las corrientes de fase se miden empleando sensores LEM externos de alta precisión (Fig. 3). Estos sensores reciben alimentación desde una caja que se encarga de gestionar los sensores de corriente y de generar las salidas que adquiere el registrador de datos HBM. El registrador dispone de canales de adquisición de alta velocidad con frecuencia de muestreo de 2 millones de muestras por segundo (2 MS/s). Las caídas de tensión en los shunts de los sensores LEM se transmiten al Gen3i por medio de cables BNC.
- El registrador Gen3i mide directamente las tensiones línea a línea del MUT empleando canales de alta tensión/alta velocidad, con una frecuencia de muestreo de 2 MS/s. De este modo, las tensiones que se adquieren se corresponden con los impulsos PWM reales que se aplican a la máquina.
- Además de la posición del rotor que le proporciona el sensor de par T40, el Gen3i mide también la posición del rotor con ayuda de un codificador incremental, del que hace uso igualmente el controlador del motor (como se muestra en la Fig. 1). Una tarjeta separadora externa recibe los impulsos del codificador y los envía al controlador del motor y al Gen3i con aislamiento galvánico.
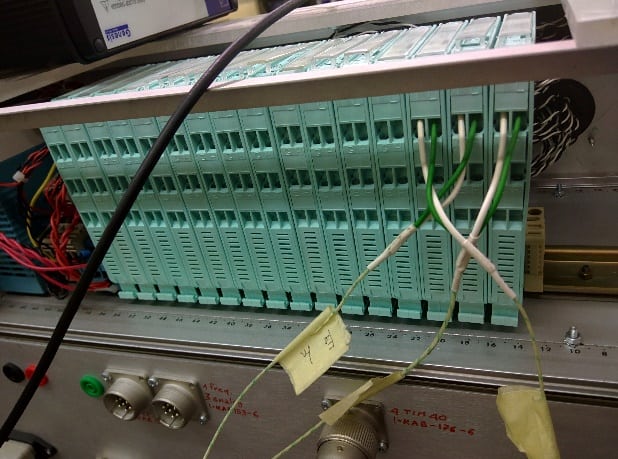
- La temperatura del motor se mide empleando tres termopares. Los valores se leen mediante amplificadores de aislamiento programables (Fig. 4), cuyas salidas se alimentan a una tarjeta de adquisición de baja velocidad del registrador Gen3i.
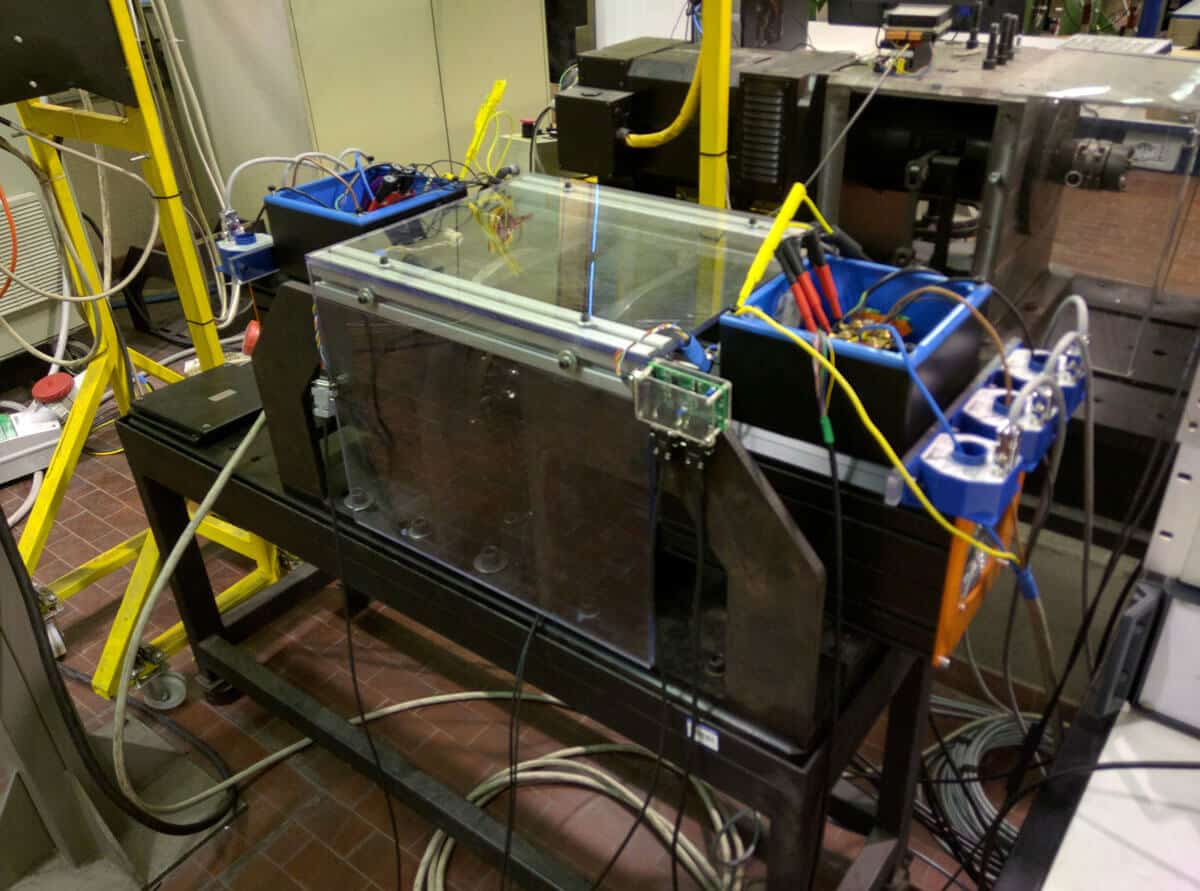
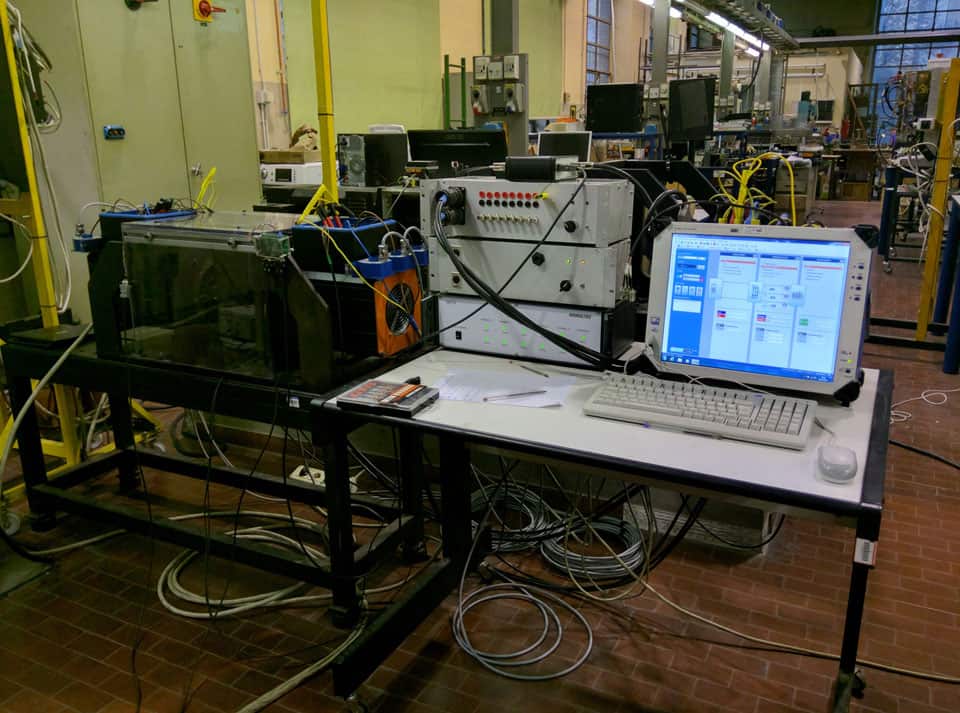
El MUT y el DM se muestran en la Fig. 5. La Fig. 6 es una vista general del banco de prueba completo, incluido el registrador de datos Gen3i de HBM.





 es la temperatura promedio del estator calculada como la media de las temperaturas k medidas en el estator.
es la temperatura promedio del estator calculada como la media de las temperaturas k medidas en el estator.






 es la potencia de entrada al inversor, que debe promediarse para eliminar cualquier ondulación en la tensión y la corriente en el enlace de CC.
es la potencia de entrada al inversor, que debe promediarse para eliminar cualquier ondulación en la tensión y la corriente en el enlace de CC.


 es la posición eléctrica que se calcula a partir de la posición mecánica medida, el número de pares de polos y una desviación que es preciso conocer.
es la posición eléctrica que se calcula a partir de la posición mecánica medida, el número de pares de polos y una desviación que es preciso conocer.