Mediciones de potencia precisas y altamente dinámicas
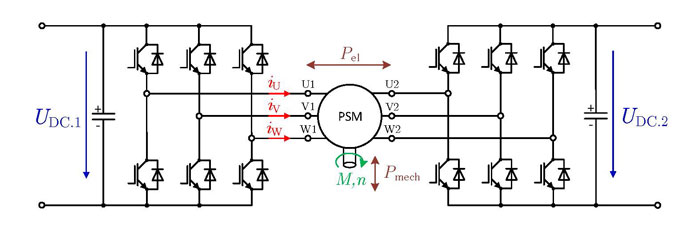
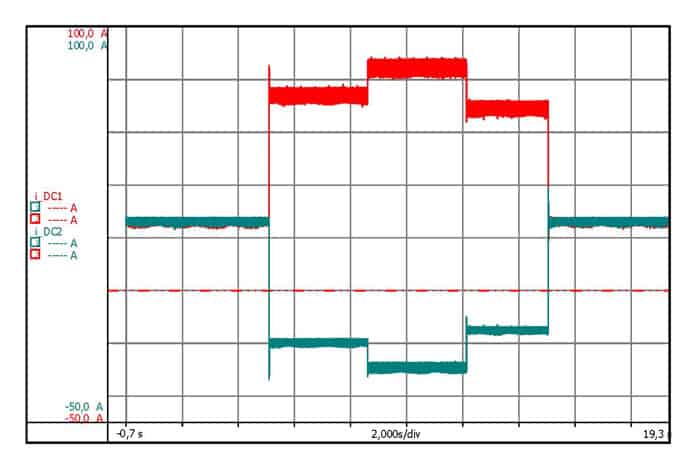
Para evaluar y probar motores eléctricos, y para implementar las correspondientes estrategias de control en las aplicaciones de movilidad eléctrica e industrial, se necesitan mediciones de potencia precisas y altamente dinámicas. En estos campos de aplicación, el sistema eléctrico consta normalmente de un inversor de dos niveles, un motor eléctrico trifásico y una fuente de energía.
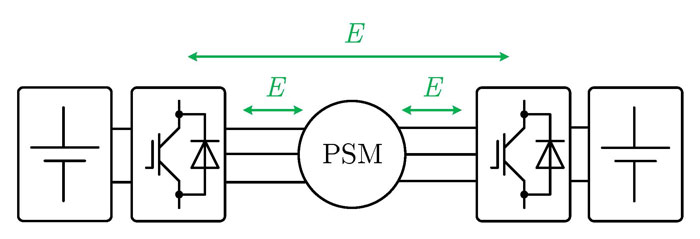
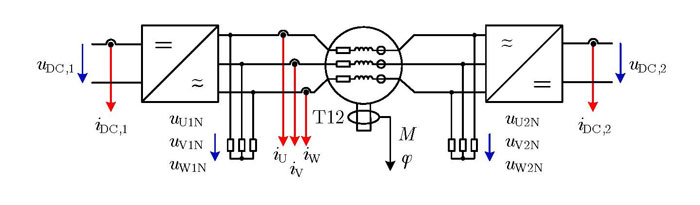
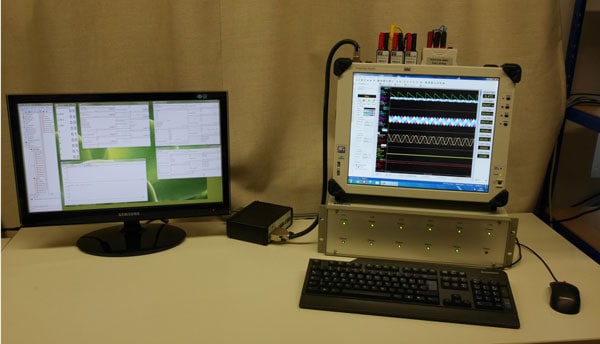
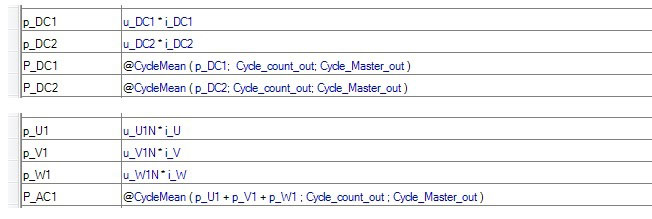
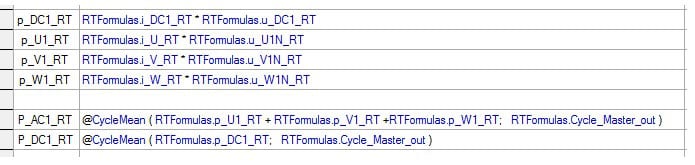
En este artículo, en primer lugar se explica en profundidad la topología de un inversor de dos niveles doble (DTLI). A continuación se aborda la adquisición de las variables mecánicas y eléctricas con el sistema de adquisición de datos GEN3i, y el cálculo de valores de potencia en tiempo real.