Con el fin de medir incluso los cambios más mínimos en la resistencia, las galgas extensométricas se conectaron a puentes completos (ver la Figura 2). Por tanto, es posible visualizar la desviación del puente. Se utilizó el software ANSYS Workbench 19.1 para determinar la deformación cualitativa de las galgas extensométricas para cada una de las direcciones de la fuerza.
Desarrollo de un sensor de fuerza de 3 ejes con galgas extensométricas de HBM
¿Cómo se podría desarrollar un pie sensorial pasivo económico para un robot que camina y transporta cargas? Esta pregunta se abordó en el marco de un proyecto de robótica del Departamento de Simulación, Optimización de sistemas y Robótica de la Universidad Politécnica de Darmstadt.
Como respuesta, se desarrolló un sensor de fuerza de 3 ejes encargado de regular el control de movimiento de un robot. El sensor utiliza galgas extensométricas para transductores de HBM.
Desafío:
Desarrollar un pie sensorial pasivo para robots capaces de caminar y transportar cargas más económico que los sensores disponibles en el mercado.
Solución:
Se desarrolló un sensor de fuerza de 3 ejes encargado de regular el control de movimiento de un robot, utilizando galgas extensométricas para transductores de HBM. Gracias a una capa de adhesivo aplicada de fábrica, el procesamiento de las galgas extensométricas resultó muy sencillo, Además, se obtuvieron muy buenos resultados.
Resultados:
Se conectaron 12 galgas extensométricas para transductores de HBM formando puentes completos, para medir hasta los cambios más mínimos en la resistencia. Los resultados de la primera batería de pruebas han sido muy prometedores y continuarán optimizándose en un proyecto consecutivo.
Configuración del sensor de fuerza de 3 ejes
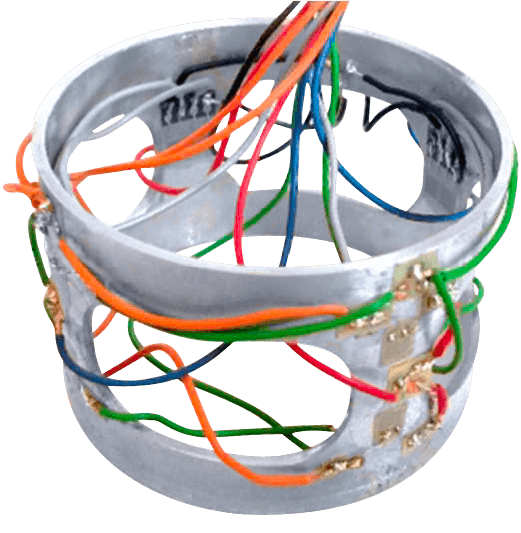
 Galgas extensométricas fijadas a un componente ligero de resorte tridimensional. (Abajo) Disposición de las galgas extensométricas en el componente de resorte desenrollado")
El sensor de fuerza de 3 ejes se basa en un componente ligero de resorte con estructura cilíndrica. Es una estructura fácil de fabricar y económica.
Para medir fuerzas en las direcciones X, Y y Z se instalaron tres puentes completos de galgas extensométricas:
- Medición en la dirección Z: Se instalaron cuatro transductores de roseta de galgas extensométricas K-TA11K3/350 en el interior del componente de resorte, empleando para ello un adhesivo bicomponente de polimerización en frío.
- Medición en las direcciones X e Y: Se colocaron ocho transductores de galgas extensométricas K-LU13K1.6/350 en el exterior del componente de resorte. Gracias a su diseño stick-on, los transductores de galgas extensométricas pueden aplicarse en caliente y son sencillos de manipular.
Las galgas extensométricas están dispuestas como se muestra en la Figura 1. Las galgas extensométricas nº 1 a 4 miden en la dirección Z, mientras que las galgas extensométricas 5 a 12 miden en las direcciones X e Y.
")
El ciclo de pruebas del prototipo
Se construyó un prototipo del sensor de fuerza de 3 ejes, con fines de verificación. El prototipo se evaluó y calibró en un primer ciclo de pruebas. El cuerpo del resorte se cargó en las tres direcciones de fuerza, una tras otra, con la ayuda de equipos de calibración.
Las condiciones de calibración para la entrada y la salida fueron las siguientes:
Señal del cero canal X (mV) | 11.42 |
Señal del cero canal Y (mV) | 5.13 |
Señal del cero canal Z (mV) | -28.90 |
Tensión de alimentación (corriente continua en V) | 3.3 |
| Amplificador | ADS1262 |
Rango de medida (V) | +/- 0.156 |
Factor de ganancia canal X | 16 |
Factor de ganancia canal Y | 16 |
Factor de ganancia canal Z | 16 |

Resultados del ciclo de pruebas
Las curvas de medición calibradas se muestran en las trazas naranja, verde y negro. Como valor de comparación, se muestra la medida de la fuerza de referencia en las trazas azules.
")
")
")
Desviación media absoluta con respecto al sensor de referencia y error relativo medio:
Dirección de la fuerza | Desviación media absoluta (N) | Error relativo medio (%) |
| Fx | aprox. 3 | aprox. 1.5 |
| Fy | aprox. 4 | aprox. 2.6 |
| Fz | aprox. 23 | aprox. 3.1 |
Los resultados del primer ciclo de pruebas muestran claramente unos resultados de buena calidad, utilizando galgas extensométricas estándar de HBM. Para optimizar aún más los resultados de la desviación media absoluta y el error relativo medio, se está llevando a cabo un proyecto de seguimiento en la Universidad Politécnica de Darmstadt.
Acerca de la Universidad Politécnica de Darmstadt
La Universidad Politécnica de Darmstadt es una de las principales universidades técnicas de Alemania y goza de una gran visibilidad y un sólido prestigio internacional. Desde su fundación en 1877, siempre ha destacado por un espíritu pionero especial. La Universidad Politécnica de Darmstadt ha hecho aportaciones en materia de investigación muy destacadas y ha abierto importantes campos de futuro.