Los transductores de fuerza, también llamados sensores de fuerza, se diferencian de las células de carga en un aspecto fundamental: mientras que las células de carga se instalan en una báscula antes de calibrar la báscula, los sensores de fuerza se calibran inmediatamente después de fabricarlos y el resultado de la calibración figura en la documentación que acompaña al producto.
Por tanto, cuando se utiliza, un transductor de fuerza debe mantener de manera fiable la sensibilidad que se ha determinado durante la calibración en fábrica. Y, para conseguirlo, hay que montarlo correctamente. Un paso muy importante dentro del procedimiento de puesta en servicio de un sensor de fuerza es el ajuste correcto del amplificador de medida. Este paso, llamado de manera general “ajuste”, garantiza que el amplificador de medida (o el software) interprete correctamente la señal de salida del sensor de fuerza de modo que, al final del proceso, se obtengan valores medidos correctos.
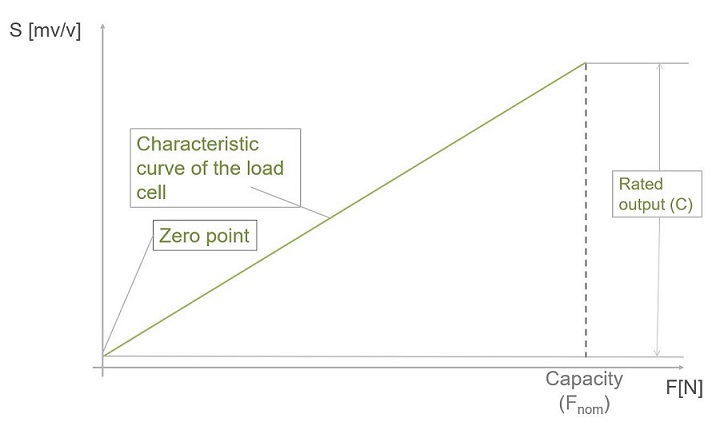
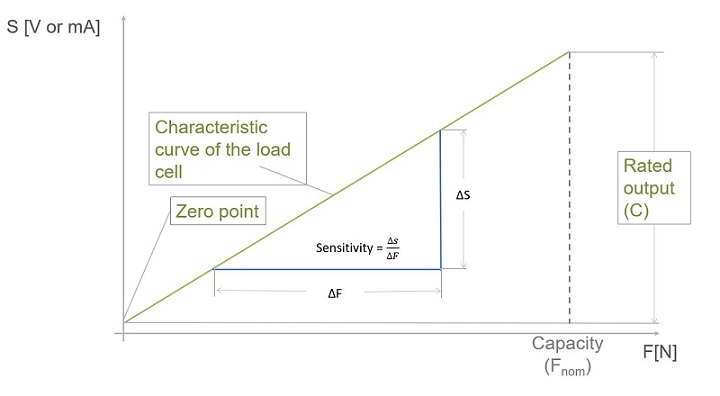
Curva característica de un sensor de fuerza
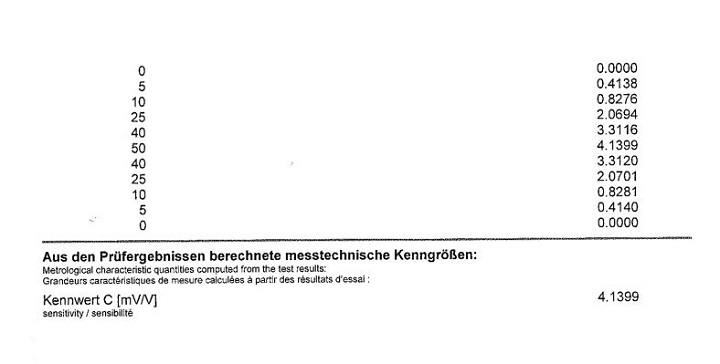
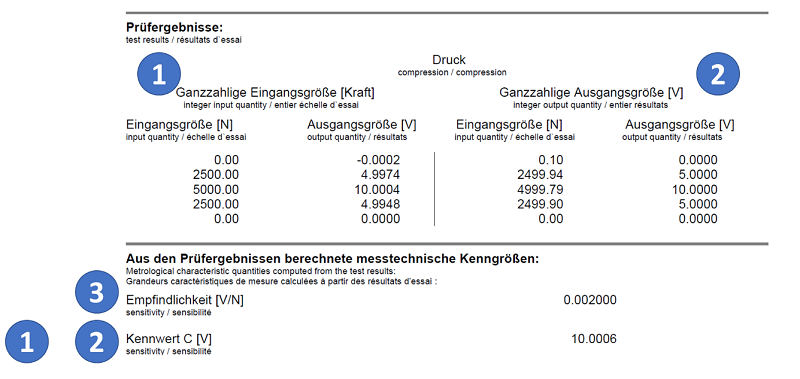
Junto con el transductor de fuerza se entrega el resultado de las medidas de calibración efectuadas durante la producción. En HBM, a este documento se le llama “informe de ensayo” (test record). En el informe de ensayo figura el valor nominal (símbolo C), medido en mV/V.