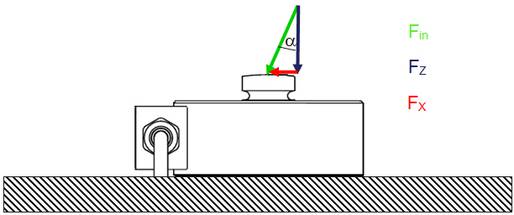
 a) Forces latérales
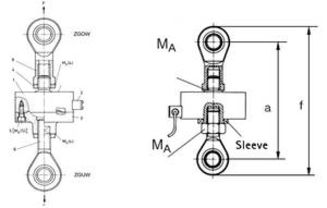
a) Forces latérales b) Moments de Flexion
b) Moments de Flexion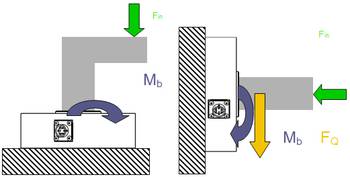


Les capteurs ainsi conçus, peuvent seulement enregistrer des forces dans le sens de compression et sont généralement équipés d'une tête d’appuiconvexe recevant l’ l'application de la charge.
L'application de la force sur la tête de charge peut être mise en œuvre avec des accessoires de montage qui sont disponibles pour de nombreux modèles de capteurs. Ceux-ci comportent par exemple des grains d’appui comme représentés dans les dessins ci-dessous.
Un grain d’appui de ce type est simplement placé sur la tête de charge. La seule précaution à prendre est simplement de s’assurer qu’il n’y ait aucun corps étranger entre le grain et la tête d’appui du capteur. Le grain a une liberté de mouvement en rotation et en inclinaison ce qui permet que les moments de flexion et de torsion ne soient pas appliqués au capteur.
Si un capteur de force est installé sans grain d’appui de ce type, il est important vis-à-vis de la tête d’appui convexe de respecter les consignes suivantes:
- HBM recommande une dureté de l’appui d’au moins 43 HRC
- La face d’appui doit être rectifiée
- Le support doit être exécuté de sorte que l’appui ne puisse se lever et que le capteur ne subisse des chocs
- Si possible, l’appuidevrait pouvoir tourner et avoir une fonction de pivot pour éviter les moments de flexion et de torsion.
Dans leurs applications, les capteurs de force sont généralement placés dans la structure. Cela signifie que la force est dirigée dans la structure sous le capteur de force. Cependant, un montagehorizontal est également imaginable. Dans ce cas, le capteur devra être relié à la structure d’une façon rigide.
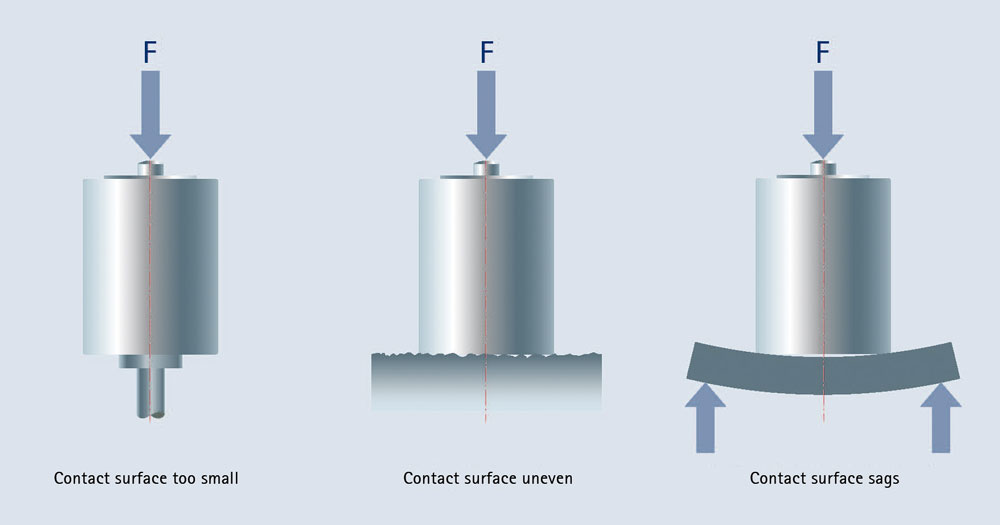
En tous cas, l'élément structural sur lequel le fond du capteur est placé doit être conçu de sorte que les forces appliquées ne génèrent seulement qu’une légère déformation. Une rigidité suffisante doit être observée dans ce but.
Il est également important que la surface soit plane. La tolérance d'inégalité maximum est de 0.005 mm. Même une structure de substrat doit être faite pour que le capteur de force soit convenablement déformé selon les critères préconisés par le fabricant pour réaliser une mesure avec une bonne exactitude.
Une structure de substrat devra résister à une déformation et doit avoir un plus grand diamètre que le capteur lui-même. Une sous-structure qui a pour conséquence une déformation significative, une surface d’appui trop petite ou bien inégale amènera forcément des déformations qui n'ont pas été prises en compte lors de la conception du capteur. Les données techniques se rapportant à la sensibilité, linéarité et hystérésis peuvent donc changer.