3. Mesures sur un moteur asynchrone alimenté par convertisseur de fréquence
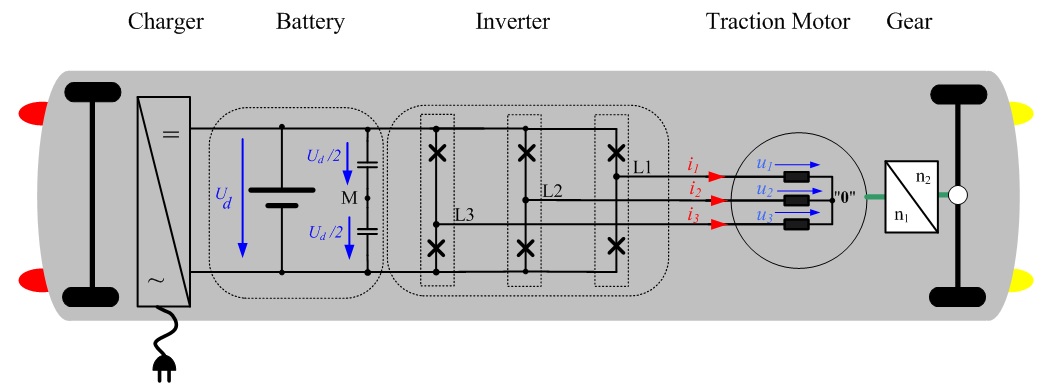
La Fig. 3.1 présente les courbes temporelles tensions de phase(u1(t),u2(t),u3(t) et courants de phase (i1(t),i2(t),i3(t)) d’un moteur asynchrone alimenté par convertisseur de fréquence. Le sens de mesure des tensions et courants est présenté dans la figure 1.1. Les valeurs des vecteurs de champ peuvent être calculées, à partir des valeurs de phase mesurées ; en utilisant l’équation 2.02. En raison du fait que Perception ne gère que des nombres réels, les parties réelle et imaginaire des vecteurs sont calculées séparément. L’équation suivante présente le calcul pour une tension et un courant de phase.

(3.01)

Fig. 3.1: les valeurs (i1,i2,i3,u1,u2,u3) et leurs vecteurs de champ calculés (ia,ib,ua,ub) (Pour les utilisateurs Perception, ces mesures sont disponibles dans les fichiers suivants : Space Vector and Air GapTorque .pNRF. Ce fichier est disponible en téléchargement depuis notre site HBM).
3.1 Calcul du flux stator dans un moteur asynchrone
Le vecteur de champ Flux stator  décrit le champ magnétique dans un moteur asynchrone. Ce vecteur flux stator est obtenu par intégration de la différence entre la tension stator et la chute de tension à la résistance stator Rs du moteur.
décrit le champ magnétique dans un moteur asynchrone. Ce vecteur flux stator est obtenu par intégration de la différence entre la tension stator et la chute de tension à la résistance stator Rs du moteur.
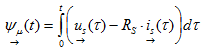
(3.06)
La faible valeur de résistance stator peut souvent être négligée, sur certains moteurs, suivant la précision attendue. En résultat de cette intégration, le flux stator est une valeur continue. Toutefois, comme représenté Fig. 3.1, la tension stator présente une forme d’onde PWM (Pulse Width Modulated), les parties réelle ψα(t) et imaginaire ψβ(t) du vecteur de champ stator sont presque sinusoïdales (Fig. 3.2a). En approximation, la trajectoire du vecteur de champ flux stator est circulaire. Le rayon de cette trajectoire circulaire correspondant à l’amplitude du flux stator.

Fig. 3.2: Vecteur de champ flux stator d’un moteur asynchrone
a) courbes temporelles des parties réelle et imaginaire
b) trajectoire du vecteur dans le plan complexe
3.2 Calcul du couple magnétique entrefers sur un moteur asynchrone alimenté par convertisseur
Sur un moteur asynchrone, le couple magnétique interne entrefers peut être calculé à partir des mesures de tension, courant ou flux. Le couple magnétique interne entre fers représente la combinaison des couples de friction internes et du couple de l’arbre moteur. Si l’on minimise les couples de friction, le couple interne calculé correspond au couple mécanique de l’arbre qui peut être mesuré très précisément à l’aide d’un capteur de couple [3].
La précision du couple calculé dépend du modèle de calcul et de la précision des paramètres moteur utilisés. Le calcul du couple interne peut être utilisé comme information de vérification redondante de la mesure faite avec un capteur de couple, car les 2 valeurs devront présenter les mêmes ordres de grandeur en amplitude. De plus, le couple proportionnel d’un moteur électrique pourra être corrélé au couple total mesuré en sortie de la transmission, via un capteur de couple mécanique. Une application possible, sur un véhicule hybride par exemple, pourra être la caractérisation et différentiation des couples apportés par le moteur électrique et par le moteur à combustion sur le couple total en sortie d’arbre.
Comme illustré dans la littérature [2] le couple interne d’un moteur asynchrone peut être calculé à partir des courants stator et flux magnétiques stator .
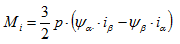
(3.06)
Dans ce cas, ρ représente le nombre de paires de pôles du moteur asynchrone. Courants et flux sont représentés par leurs vecteurs de champ. La Fig. 3.3 illustre les courbes temporelles des courants et flux stator ainsi que le couple magnétique interne entrefersMi calculé p partir de ces valeurs. La sur-oscillation du couple est clairement visible. Cette sur-oscillation haute-fréquence du couple est générée par les commutations haute fréquence du convertisseur. Il est essentiel d’identifier la période du fondamental du courant sur le moteur pour que Perception puisse calculer le couple magnétique entre fers.

Fig. 3.3: Réponse temporelle du courant stator (iα, iβ), flux stator (ψα, ψβ) et du couple magnétique entrefers Mi