
- Chaque module est une unité d'acquisition de données
- Embarqué et autonome pour les tests sur véhicules
- Communication temps réel pour les tests sur banc d’essai
- Portatif pour les opérations de service
- Installation permanente pour les applications de surveillance
QuantumX : Le système d'acquisition de données universel et modulaire
Le système d'acquisition de données (DAQ) QuantumX est l'outil idéal pour tous vos besoins de tests et de mesure. QuantumX est le choix parfait pour l’acquisition de données fiables de différentes grandeurs physiques et capteurs basés sur des technologies différentes. Il offre la capacité unique d'acquérir n'importe quel signal, depuis n’importe quel capteur.
Flexible
Fiable
- Commercialisé depuis plus de dix ans et plébiscité par des milliers d’utilisateurs
- Grande précision de mesure grâce à une technologie brevetée
- Stabilité à long terme et certificat d'étalonnage intégré
Facile à utiliser
Compact et portatif
Utilisation intuitive grâce aux logiciels Catman de HBM
Compatible avec de nombreuses plates-formes logicielles : LabView, Visual Studio .NET, DIAdem, CANape, DASYlab, et plus encore !
Une chaîne de mesure fiable
Universel et fiable, le système d'acquisition de données de haute précision QuantumX, peut parfaitement être combiné aux capteurs HBM et au logiciel catman afin d’offrir une solution complète dans le domaine du test et mesure. Depuis le capteur au logiciel, il suffit simplement de « brancher et mesurer ».

Pour de nombreuses applications
 Laboratoires et bancs d’essai
Laboratoires et bancs d’essai
- Essais de durabilité des structures
- Essais sur groupes motopropulseurs, moteurs, transmission dynamique
- Essais mécaniques et électriques de systèmes et de composants
- Analyse dynamique/ essais en soufflerie
 Acquisition de données mobile
Acquisition de données mobile
- Acquisition mobile de contraintes de composants mécaniques sur routes et pistes mauvaises
- Essais dynamiques des véhicule (turbulences et maniabilité)
- Test de freinage ou recette
- Surveillance globale des véhicules et routes
 Essais aeronautiques
Essais aeronautiques
- Essai de durabilité des structures / Essai de fatigue
- Essai de propulsion (poussée, performance, durabilité)
- Essai « Iron bird »
- Test d’impact : test de chocs et d’impacts (oiseau, drone)
- Analyse du centre de gravité
 Moteurs électriques et stockage d’énergie
Moteurs électriques et stockage d’énergie
 Service/Maintenance
Service/Maintenance
- Étalonnage des machines
- Étude de défaillances et diagnostics
 Surveillance de l’état structurel
Surveillance de l’état structurel
Cas clients

Sikorsky, filiale du groupe Lockheed Martin et HBM ont finalisé l’Operational Readiness Review (ORR) du nouveau système d'acquisition de données GEN6 qui sera donc officiellement en service.
Basé sur le système d'acquisition de données universel et modulaire QuantumX, de HBM, et développé en étroite collaboration avec le client, le nouveau système d’acquisition de données GEN6 offrira au laboratoire de Sikorski, de nouvelles capacités pour l'acquisition, le traitement et le stockage des données.

« Nous avons réduit notre sélection à quatre amplificateurs de mesure.Finalement, le système QuantumX de HBM nous a convaincus lors des essais pratiques, en notamment car ses incertitudes de mesures sont particulièrement basses. »
Bruno Kanzenbach, Senior Engineer chez Toyota Motorsport GmbH (TMG)

« Nous avons sélectionné QuantumX parce que nous pouvions y connecter facilement n'importe quel capteur et qu'il présentait d'excellentes capacités d'enregistrement à la fois en termes de durée et de débit d'enregistrement. »
Matt Williams, Senior Structural Test Engineer chez Agusta Westland

Comparaison des modules QuantumX
Comparez les modules QuantumX et trouvez le modèle le mieux adapté à vos besoins en cliquant sur l'image de droite.
Choisissez le module ou le système de mesure adapté à vos besoins selon le nombre de voies, le débit d'échantillonnage ou le type de signal – tension, intensité, jauge de contrainte, etc.
Après avoir sélectionné le QuantumX le mieux adapté, descendez, en bas de page pour en savoir plus sur ce module spécifique.
Cliquez sur l'image de droite pour l'agrandir
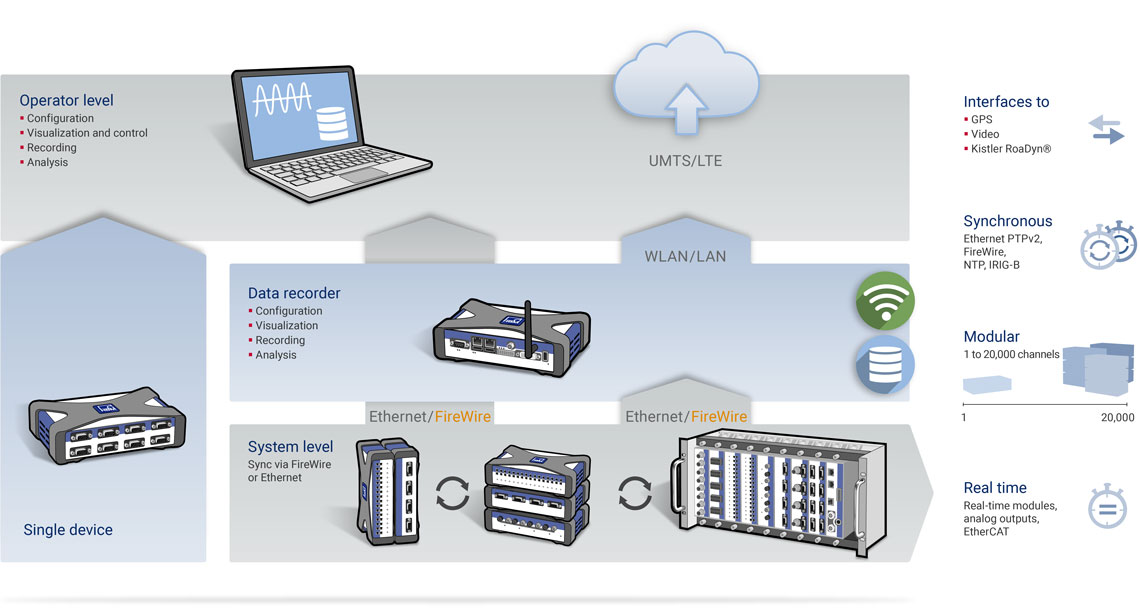
Concept modulaire
Connectez un seul module à votre PC et commencez à travailler
Distribuez plusieurs modules et installez-les à proximité de vos points de mesure et de vos capteurs
Déployez plusieurs centaines de cannaux centralisés pour un grand nombre de voies
Utilisez le puissant enregistreur de données pour votre essai autonome et intégrez-le dans le cloud
Intégrez le module en temps réel pour les bancs d’essai automatisé
Concevez votre propre essais, grâce à la simulation de signal en temps réel
Intégrez n'importe quel capteur et transférez les valeurs numériques dans une sortie CAN ou une sortie analogique (passerelle).
QuantumX Modules
Amplificateur universels MX440B et MX840B 
Amplificateur universel 4 ou 8 voies de la gamme QuantumX
Compatible avec les technologies de capteurs suivantes :
- Jauges en demi-pont ou pont complet
- Capteurs piézoélectriques alimentés en courant (IEPE, ICP)
- Piézorésistifs pont complet
- Sondes de température (PT100, PT1000)
- Thermocouples (Types K, N, R, S, T, B, E, J, C)
- Résistance Ohmique
- Potentiomètres
- Inductifs demi-pont ou pont complet, LVDT
- Tension (± 100mV, ± 10V, ± 60V) Courant (0 / 4 … mA, 2-3 ou 4-fils)
- Résistances (PTC, NTC, KTY, ...)
- Voies 5-8, en complément : codeur rotatif, mesure de fréquence, SSI
- CAN bus
En savoir plus HBMshop Etalonnez votre module
![]()
Amplificateur universel MX410B
Amplificateur universel 4 voies de la gamme QuantumX pour mesures dynamiques
Compatible avec les technologies de capteurs suivantes :
- Jauges de contrainte demi-pont ou pont complet (CC ou CF avec fréquence porteuse 4,8 kHz)
- Jauge de contrainte quart de pont avec adaptateur
- Capteurs piézoélectriques alimentés en courant (IEPE, ICP)
- Piézorésistifs pont complet
- Systèmes inductifs ponts complets ou demi-ponts
- Tension (±10 V)
- Courant ( 0 / 4...20 mA, 2/3 ou 4 fils)
- Recopie analogique (±10 V)
En savoir plus HBMshop Etalonnez votre module
![]()
Module de mesure de fréquence & comptage MX460B
Module de 4 voies de très haute dynamique de la gamme QuantumX pour l'acquisition des mesures de couple, de vitesse de rotation, d'angle, de position et de déplacement
Compatible avec les technologies de capteurs suivantes :
- Capteurs à fréquence (ex. couplemètres HBM)
- Comptage d’impulsions, codeur incrémental, codeur
- Capteurs de vitesse de rotation inductifs passifs (couplés CA)
- Signaux modulés en largeur d'impulsion (PWM)
En savoir plus HBMshop Etalonnez votre module
![]()
Amplificateur à pont complet MX430B
Module de mesure en pont complet à 4 voies de la gamme QuantumX pour les mesures de haute précision de jauges de contrainte en pont complet (dynamique, statique)
Compatible avec les technologies de capteurs suivantes :
- Jauge de contrainte en pont complet (CC, fréquence porteuse 600 Hz)
En savoir plus HBMshop Etalonnez votre module

Amplificateur de mesure de très haute précision MX238B
Module de mesure de très haute précision à 2 voies de la gamme QuantumX pour les mesures pour jauges de contrainte en pont complet raccordées
Compatible avec les technologies de capteurs suivantes :
- Jauge de contrainte en pont complet (CC, fréquence porteuse 225 Hz)
En savoir plus HBMshop Etalonnez votre module
![]()
Amplificateur jauge de contrainte MX1615B/MX1616B
Module de 16 voies de la gamme QuantumX
Compatible avec les technologies de capteurs suivantes :
- Jauge de contrainte demi-pont ou pont complet (CC ou CF avec fréquence porteuse 1200Hz)
- Jauge de contrainte quart de pont (CC ou fréquence porteuse 1 200 Hz, résistance de terminaison 120/350/1 000 ohms)
- Tension (±10 V)
- Sonde de température (Pt100)
- Résistance
- Potentiomètre
En savoir plus HBMshop Etalonnez votre module
![]()
Amplificateur tension-courant MX1601B
Module de 16 voies de la gamme QuantumX
Compatible avec les technologies de capteurs suivantes :
- Capteurs piézoélectriques alimentés en courant (IEPE, ICP)
- Tension (±100 mV, ±10 et ±60 V)
- Courant (0/4 ... 20 mA, 2/3 ou 4 fils)
En savoir plus HBMshop Etalonnez votre module
![]()
Amplificateur thermocouple MX1609
Module de 16 voies de la gamme QuantumX
Compatible avec les technologies de capteurs suivantes :
- Thermocouple de type K (MX1609KB)
- Thermocouple de type K (MX1609TB)
En savoir plus HBMshop Etalonnez votre module
![]()
Amplificateur thermocouple isolé MX809B
Module de 8 voies de la gamme QuantumX pour les mesures de Température et en présence d’un potentiel élevé
Compatible avec les technologies de capteurs suivantes :
- Thermocouples de type K, J, T, B, E, N, R, S, C avec soudure froide interne pour chaque voie
- Tension (±5 V)
En savoir plus HBMshop Etalonnez votre module
 Module de mesure de tensions MX403B
Module de mesure de tensions MX403B
Module de 4 voies de la gamme QuantumX pour des mesures de tensions dans le domaine de la BT
Permet les mesures suivantes :
- Tension (10, 100 et 1 000 V)
- Gammes de mesures : 1250 V (non CAT), 1 000 V CAT II, 600 V CAT III
En savoir plus HBMshop Etalonnez votre module
![]()
Module MX471C CAN FD / CAN
Module de 4 voies compatible CAN FD ou CAN 2.0
- Acquisition synchronisée de messages CAN
- Résistance de terminaison intégrée commutable

Module passerelle CX27C
La passerelle CX27C offre des options pour une intégration simplifiée :
- Intégration en temps réel de modules QuantumX/SomatXR (EtherCAT™ ou PROFINET IRT) pour régulation, contrôle, automatisation et surveillance
- Parallèlement, connexion au logiciel de mesure du PC pour acquisition et analyse synchrones des données de signal jusqu'à 100 KHz par voie
![]()
Enregistreur de données CX22B-W
Le CX22B-W est l’enregistreur de données idéal pour :
- Stockage interne de données de tous les signaux des modules QuantumX/SomatXR connectés
- Enregistrement autonome dans un format de données robuste, exportation possible dans d'autres formats
- Fonction de passerelle (LAN, WLAN) vers le PC
- Capacités de calcul et d'analyse des signaux, ex. comptage, FFT, puissance électrique et calculs d’efficacité
- Large possibilité d’options de visualisation
- Intégration de caméras (photos, vidéos), systèmes de géolocalisation (GPS), roues de mesure, stations météo
- Notification/alertes de l’état du système et de signal
- Surveillance facile (écran tactile, clavier à distance ou connecté)
![]()
Module MX471C CAN FD / CAN
Module de 4 voies compatible CAN FD ou CAN 2.0
- Acquisition synchronisée de messages CAN
- Résistance de terminaison intégrée commutable
![]()
Module de sortie analogique MX878B
Module de 8 voies de la gamme QuantumX pour la sortie de tensions analogiques
Le module offre les capacités suivantes :
- 8 sorties de tensions analogiques (± 10V) pour sortie en temps réel
- Calcul en temps réel (matrice, PID, alarmes, etc.)
- Configuration de profil de sortie (harmonique ou arbitraire)
- Contrôle direct au niveau du PC
En savoir plus HBMshop Etalonnez votre module
![]()
Module MX879B multi E/S
Module de 32 voies multi E/S de la gamme QuantumX pour sortie de tension analogique et entrée/sortie TOR
Le module offre les capacités suivantes :
- 8 sorties de tension analogiques (± 10V) pour sortie en temps réel
- 32 entrées/sorties TOR (5 V, 24 V, jusqu’à 500 mA)
- Calcul en temps réel (matrice, PID, alarmes, etc.)
- Configuration de profil de sortie (harmonique ou arbitraire)
- Contrôle direct au niveau du PC
En savoir plus HBMshop Etalonnez votre module
![]()
Module MX471C CAN FD / CAN
Module de 4 voies compatible CAN FD ou CAN 2.0
- Acquisition synchronisée de messages CAN
- Résistance de terminaison intégrée commutable
Logiciel d’acquisition de données catman
Le Logiciel d’acquisition et d’analyse de données catman de HBM est le partenaire idéal des modules QuantumX et SomatXR. Catman permet la visualisation de vos mesures et des données numériques, supporte plusieurs formats de stockage, permet l’automatisation, analyse de données pendant la mesure ou en post-traitement et la création des rapports d’essais.
- Visualisation des données de mesure
- Analyse en ligne grâce à une large bibliothèque
- Stockage et exportation des données dans différents formats
- Analyse de données
- Rapports

QuantumX provides you supplementary accessories for your measurement applications and projects.
QuantumX Video & Brochure
Cette vidéo vous présente les nombreuses fonctionnalités de QuantumX.
Cette vidéo vous présente comment utiliser le logiciel catman Enterprise pour le paramétrage et la visualisation d’un nombre très important de voies de mesure.