Création d'une voie de calcul
une nouvelle voie calcul « rotation synchronous filter» dans Analyse category.
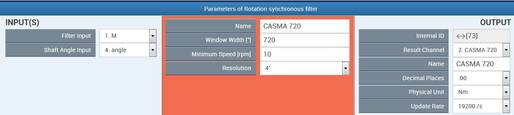
Ajuster les paramètres
- Entré du filtre : Entrer ici le signal à filtrer.
- Entré de l’angle de l’arbre : Entrer ici le signal d’angle du capteur de rotation. Les valeurs mesurées doivent tomber entre 0° et 360°.
- Largeur de fenêtre : Spécifier ici la plage au-delà de laquelle la moyenne mobile sera calculée. La largeur doit être comprise entre 30° et 720°. Le réglage par défaut est de 180°. Le rapport largeur de fenêtre / résolution doit être à moins de 180.
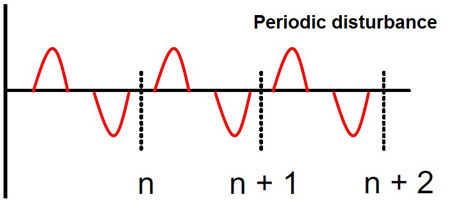
La largeur de fenêtre peut être facilement trouvée expérimentalement en projetant la période de temps de l'interférence sur l'angle de rotation (voir la vue d’écran). Dans cet exemple particulier, l'interférence périodique se produit tous les 720°.

- Vitesse minimum : Cette vitesse de rotation virtuelle est appliquée quand la vitesse de rotation active est plus petite que la vitesse de rotation minimum définie.
- Résolution : Cette valeur détermine tous les combiens (combien de degrés à chaque fois) une nouvelle moyenne sera calculée. Noter bien que la vitesse de rotation maximale admissible autorisée dépend de cette valeur car la vitesse de calcul est déterminée par la vitesse globale de mise à jour.
La valeur théorique est dérivée selon la formule : Vitesse maximale de rotation = Résolution x vitesse de mise à jour / 6.
Pour des raisons pratiques, vous devriez utiliser des valeurs qui soient seulement de 10 à 20% de cette vitesse de rotation maximale théoriquement possible.
Résolution | Vitesse maximale de rotation théorique à une vitesse de mise à jour de 19,200 Hz | La vitesse maximale de rotation théorique à une vitesse de mise à jour de 38,400 Hz |
1° | 3200 tr/mn | 6400 tr/mn |
2° | 6400 tr/mn | 12800 tr/mn |
4° | 12800 tr/mn | 25600 tr/mn |
6° | 19200 tr/mn | 38400 tr/mn |
8° | 25600 tr/mn | 51200 tr/mn |
Les multiples suivants de vitesse de rotation sont supprimés selon la largeur de fenêtre :
Largeur de fenêtre | Multiples |
90° | 4, 8, 12, … |
120° | 3, 6, 9, … |
180° | 2, 4, 6, … |
360° | 1, 2, 3, … |
720° | 0, 5, 1, 1, 5, … |
Note : Si un des signaux source est invalide, le signal de sortie sera aussi invalide.
CASMA en fonctionnement
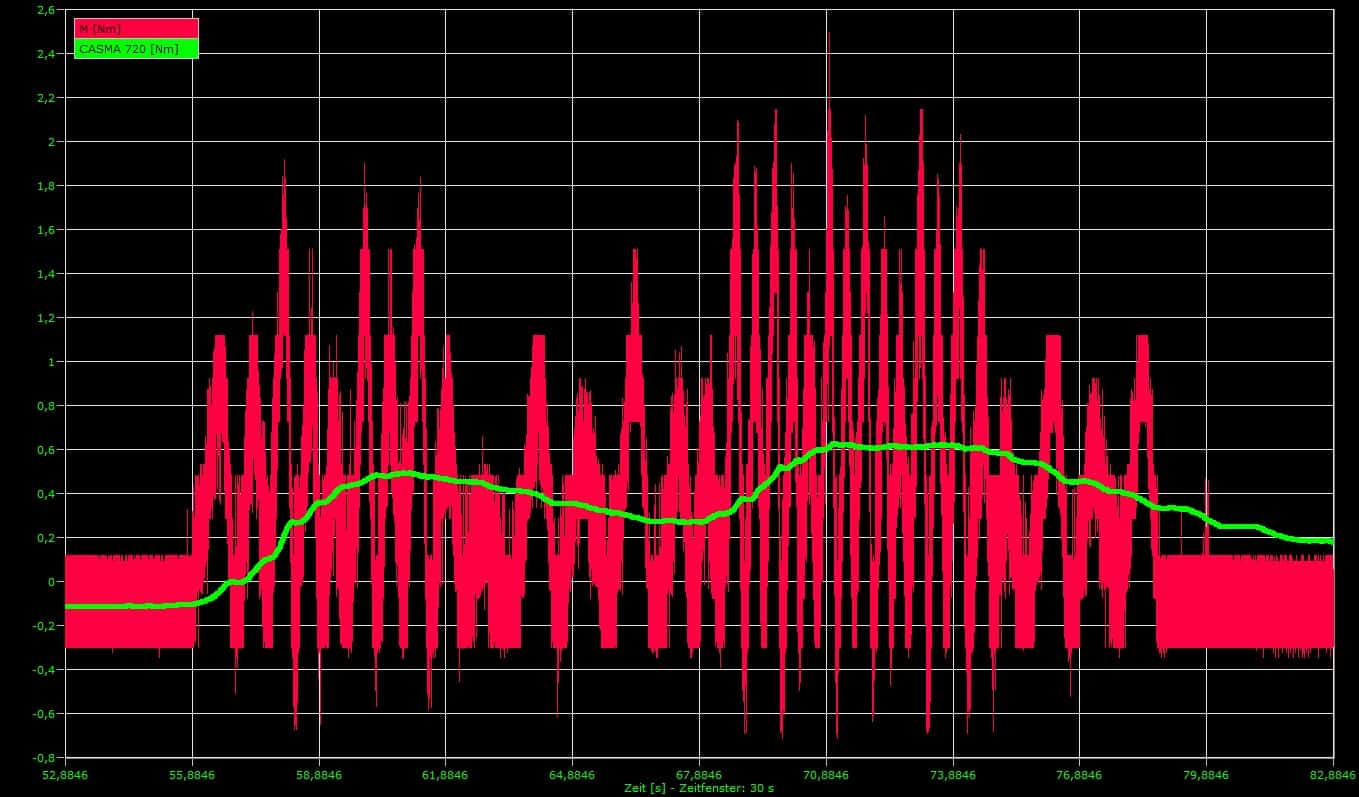
Dans le diagramme ci-dessous le signal non filtré du couple est en rouge, le signal filtré du couple par le filtre CASMA est en vert.
Nous pouvons voir, clairement, que le filtre CASMA effectue un excellent filtrage du signal réalisant ainsi une bonne stabilité de la mesure du couple en corrélation avec la vitesse du moteur, qui évolue également au cours du temps. Plus la largeur de ce filtre est grande, plus les résultats sont meilleurs.