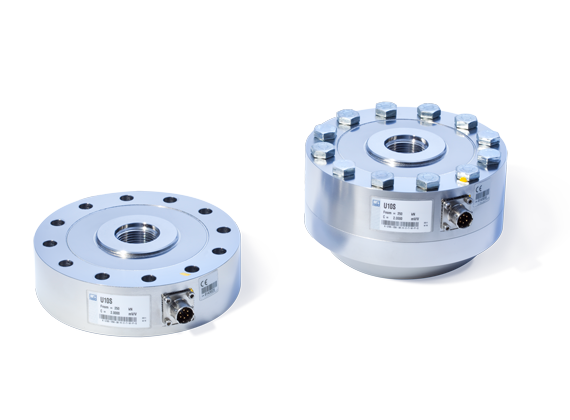
Capteur de Force U10 : Portées nominales de 1.25kN à 2.5MN
Avec une symétrie circulaire et une faible hauteur, le capteur de force U10 offre de nombreuses possibilités dans différents domaines d’application comme les bancs d’essai, les machines d'essai des matériaux et les lignes de production. Le capteur U10 permet de mesurer des forces de traction et de compression en statique et dynamique.
- Classe d'exactitude HBM : 0.02 à 0.05
- Portées nominales: 1.25kN à 2.5MN

