L'université de Geisenheim a développé un nouveau concept d’engin pour le travail mécanisé sur des terrains en pente raide. Il s’agit du robot « Geisi », sans aucune corde ou câble, se déplace sur pentes pouvant aller jusqu'à 70% et ceci à l’aide d’une simple télécommande.
Dans les régions viticoles d’Allemagne, le paysage se compose de nombreuses vignes plantées sur des pentes raides. Proportionnellement, le nombre de pentes raides cultivées diminue fortement. En 2010, il était au plus bas et ne représentait seulement que 9 % de la surface totale cultivée. Une des raisons à cela, est que la culture des vignes sur pentes raides est réalisée entièrement à la main. Le travail est également dangereux, physiquement exigeant et assez coûteux. L'Institut de Technologie de l'Université de Geisenheim, espère remédier à cette situation en facilitant sensiblement cette viticulture sur les terrains fortement pentus.
Une équipe dirigée par le Professeur Schwarz s'est attachée à développer un nouveau concept d’engin pour le travail mécanisé sur pentes raides, le robot se nomme Geisi. À la différence des autres équipements existants dans la culture mécanisée, Geisi pourra travailler sur des pentes pouvant aller jusqu'à 70%. Cet engin permet de réduire les coûts de main-d’œuvre tout en assurant une sécurité de travail indéniable.
Ce robot peut effectuer de nombreuses tâches sur de très longue période, sans se fatiguer, comme par exemple pour aider à la protection des cultures et aux travaux de paillage ou bien encore de feuillage. D'autre part, le Geisi sera commercialisé à un prix inférieur à celui des systèmes mécanisés actuels sur ce type d’application.
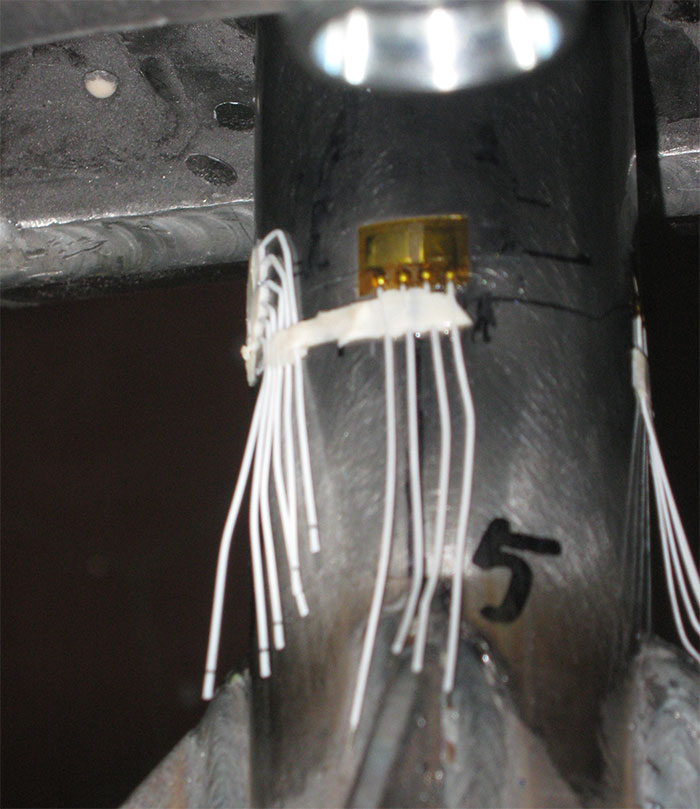
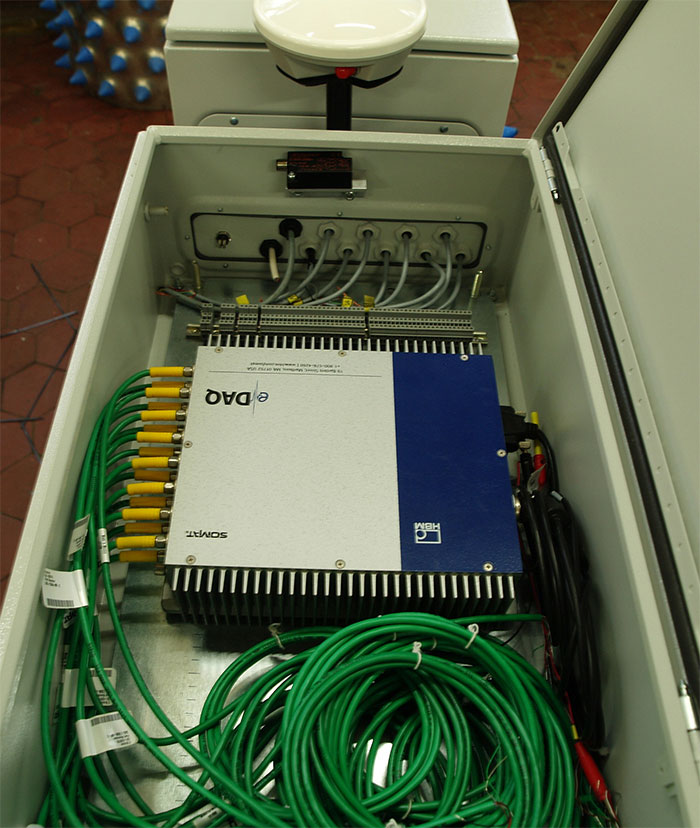
Pour que les objectifs deviennent réalité, les chefs de projet effectué des mesures et ont pour cela embarqué une instrumentation HBM. Les jauges de contrainte reliées à un système d’acquisition de données, durci et mobile, Somat eDAQ ont permis de contribuer au bon fonctionnement du Geisi notamment dans ses déplacements sur des terrains dénivelés.