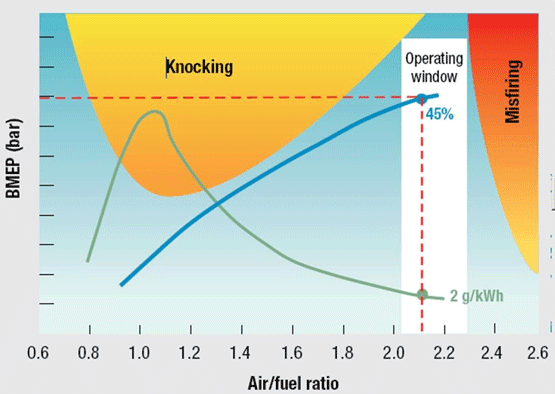
The international MARPOL Convention on the gradual reduction of pollutant emissions calls upon the marine engine industry to develop new engines that can work on a combination of various fuels, such as classic marine fuels and Liquefied Natural Gas (LNG), because with the additional fuel, the dual fuel engines achieve the required reduced exhaust gas readings without any problems. These engines that can utilize different types of fuel must be able to switch quickly from one fuel to another, without any loss of power if possible. In addition, when the engine is being used in LNG mode, critical operating modes (of the cylinder pressure), such as knocking, misfiring or overload (see Fig. 1), must also be reliably prevented.
Optimization of Ship Engine's with Precise Torque Transducer T40MAR
The performance optimization of ships' engines utilizing the highly precise and reliable T40MAR torque sensor from HBM enables considerable fuel savings and is also in line with the constantly increasing demands of international regulations.
The variable for ensuring this is the precise identification of the load signal. This applies for both switching between classic marine fuels and LNG without any loss of power and always driving the operating point of the engine in its optimum operating window, irrespective of the driving situation [1]. Fuel input, is, thus significantly reduced, and at the same time, a marked increase in efficiency is attained (see Fig.1).
To identify the load signal, the drive power P is calculated from a precise measurement of the torque M on the engine and angular velocity ω and transmitted to the central electronic unit.
P = ω*M (1)
Only sufficient measurement accuracy of the load measurements enables proper control of these ships' engines in their optimum working window [1]. The more accurate the torque information, the more precise is the control. Torque can be measured directly or indirectly.
How to Measure Load?
Indirect Load Measurement
The indirect load measurement on a shaft in the drive train entails measuring torque-related parameters and subsequent calculations. These torque-related parameters are usually determined by:
- Strain measurements on the surface of the input shaft. Strain gauges are glued directly onto the shaft for this purpose, and then connected into a measuring bridge. Transmission of both the measuring bridge’s excitation voltage and the measurement signal is contactless in both cases.
- Measurement of the shaft torsion angle.
Direct Load Measurement
Direct load measurement employs an inline torque transducer as an integrated part of the drive shaft (see Fig. 2). The torque transducer is already calibrated at the manufacturer’s site utilizing appropriate calibration machines. The transducer can be easily installed, removed, replaced, and recalibrated.

Both methods offer some advantages, e.g. retrofitting of existing systems. Depending on the installation quality and the components used, the torque value to be subsequently calculated might have a relatively high uncertainty because of the tolerances (see Tab. 1), which finally results in a relatively high measurement uncertainty
| Input variables | Indirect: Strain gauge | Direct: Torque Sensor |
| Young‘s modulus | 2 … 5% | ~ 0% |
| Gauge factor | ~ 1% | ~ 0% |
| Shaft geometry | ~ 1% | ~ 0% |
| Strain gauge positioning | 1 … 5% | ~ 0% |
| T° impact | 2 … 5% | ~ 0,1% |
| Total | 5 … 7% , not detectable | ~ 0,2 … 0,3%, detectable |
Calibration and Traceability
In addition to measuring high torque values, the calibration and traceability of this physical quantity are increasingly coming into focus to ensure the precision of the drive power or the efficiency, which are essential to meet the strict environmental regulations in the marine engine industry [2]. Basically, three methods of torque calibration are distinguished:
- Lever-arm-mass systems – A precisely defined torque is generated when the weight force of calibrated masses acts on the test specimen by means of a lever arm of known length [4].
- The second technique in torque calibration is carried out utilizing a force reference transducer with a lever arm [3].
- The third principle is a torque reference transducer which provides the reference value.
Systems with torque reference transducers can use any mechanism to generate the torque, which is then measured with the torque reference transducer [2] [3].

HBM’s Torque Calibration Machine
According to the reference standard calibration method, this new calibration machine (see Fig. 3) combines features of the two following methods used for torque calibration: The lever-arm-mass system and the method including a torque reference transducer that provides the reference torque. Modified T10FH/150 kN·m and T10FH/400 kN·m torque transducers were chosen as reference transducers. Due to the two precision reference transducers, a reduced measurement uncertainty of 0.1 % could be achieved.
The main contribution to these remarkable uncertainty results is made by the documented unbroken chain of comparisons tracing back these torque transducers to the reference transducer of the German National Standard. The measurement uncertainty of the German National standard, the highest rank calibration machine with 1.1 MN·m also referred to as "torque standard machine" and located at PTB, to which this new 400 kN·m calibration machine is traced back, is 0.08 %.
Conclusion
T40MAR is HBM’s torque flange that was specially developed and certified for use in ship propulsion systems. Its measurement accuracy enables the calculation of load signals with an at least 10 times higher accuracy than required by the shipping industry’s current environmental regulations.
References
[1] K. Weissbrodt, Direct torque measurement on large drives with very small tolerances, Paper Hottinger Baldwin Messtechnik GmbH (2011)
[2] H. Frais, L. Lioba, D. Röske, Development of a New 400KN.m Torque Calibration Machine, Paper, Hottinger Baldwin Messtechnik GmbH (2015)
[3] R. Schicker and G. Wegener, Measuring Torque Correctly. Bielefeld: Hottinger Baldwin Messtechnik GmbH. (2002)
[4] Davis, F.A. The 1st UK National Standard Static Torque Calibration Machine-New Design Concepts Lead The way. Measurement Science Conference in Anaheim, USA. (2002)