At the end of the day, most applications have size restrictions and cost restrictions, which determine many of the variables before motor design even begins.
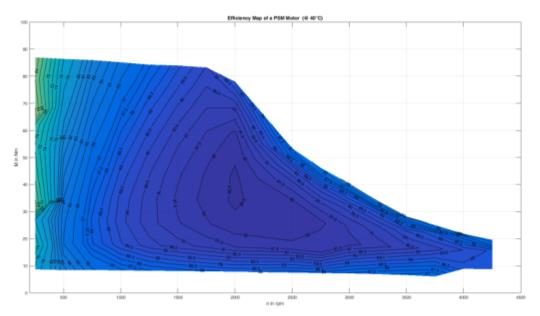
Hence, we have the choice of topology and small details, based on the control scheme that groups want to use. There are also choices that can be made with cooling, and how the motors are wound. The main types of motor are induction, permanent magnet, wound field, and switched reluctance. Induction motors are the easiest to control, we understand them the best, they are a total workhorse of industry; however, their downside is that the field needs to be excited, which results in losses. Permanent magnet (PM) motors are used a lot in applications where efficiency is important and size is a restriction, as they have a higher Power Density because the magnet supplies the rotor field rather than having the losses in the rotor
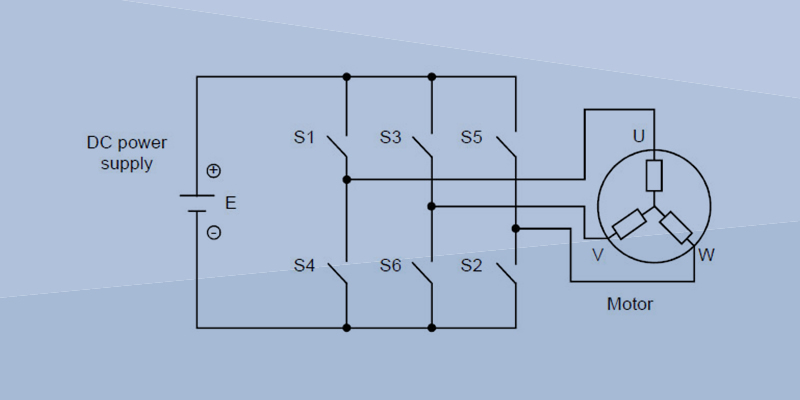
These PM motors require an inverter and a lot of cooling and care when operating in different modes. They also have the down-side of losing out on Constant Power Speed Ratio CPSR, because the field cannot be weakened as easily. Field weakening is a method of reducing the rotor’s magnetic field in order to increase the speed of a machine. We can weaken the field in the Induction Machine or PM machine by injecting q-axis current. The need to have controlled amounts of q axis (used to control torque) or d axis (used to control rotor field) current for FOC is a reason why many groups are interested in monitoring their dq0 plots in real time. With a PM machine more considerations need to be taken because the magnets can become demagnetized during field weakening and back emf may need to be monitored.
Synchronous Reluctance (SR) motors have a very simple rotor which is simply a lamination with a specific pattern. These motors use the property of reluctance torque in order to create rotational motion. These motors are very useful in a variety of applications because of their simple construction but have the downside of creating a large amount of noise and vibration. For this reason they have only been used in specific scenarios. During testing of these machines, researchers are mainly interested in having a vibration map of what torque and speed vibrations are the strongest.