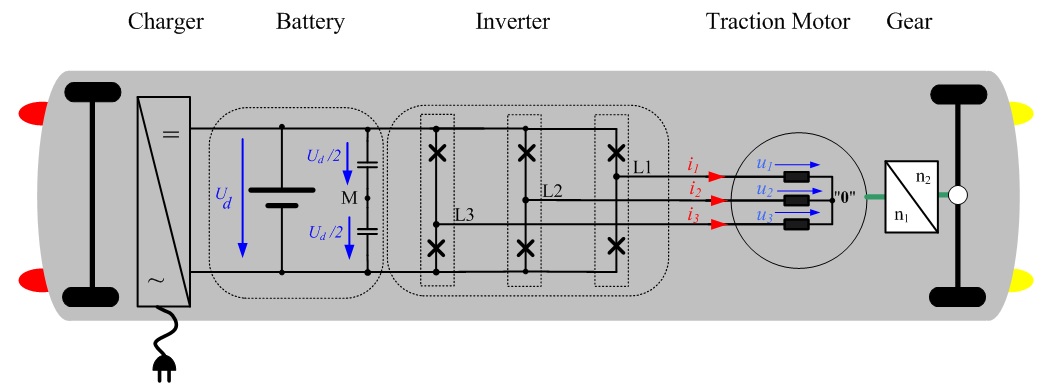
3. Misurazioni su un motore asincrono alimentato da inverter
La Fig. 3.1 mostra l'andamento temporale delle tensioni di fase di un motore asincrono alimentato da inverter (u1(t),u2(t),u3(t)) e le correnti di fase (i1(t),i2(t),i3(t)). La direzione di conteggio delle correnti e tensioni è mostrata nella panoramica della Figura 3.1. Le grandezze dei vettori spaziali si possono calcolare partendo da quelle delle fasi misurate utilizzando l'equazione 2.02. Poiché in Perception tutte le variabili devono essere numeri reali, le parti reale ed immaginaria del vettore spaziale devono essere calcolate separatamente. La seguente equazione mostra questo calcolo per la tensione di fase e la corrente di fase.

(3.01)

Fig. 3.1: Grandezze di fase misurate (i1,i2,i3,u1,u2,u3) e grandezze dei vettori spaziali calcolate (ia,ib,ua,ub) (Per gli utenti di Perception, queste misurazioni sono disponibili nel seguente file: Space Vector and Air GapTorque .pNRF. Questo file è disponibile e scaricabile dal sito Web della HBM).
3.1 Calcolo del flusso dello statore di un motore asincrono
Il vettore spaziale del flusso dello statore  descrive il campo magnetico in un motore asincrono. Il vettore spaziale del flusso dello statore si ottiene integrando la differenza fra la tensione dello statore e la caduta di tensione sulla resistenza dello statore Rs del motore.
descrive il campo magnetico in un motore asincrono. Il vettore spaziale del flusso dello statore si ottiene integrando la differenza fra la tensione dello statore e la caduta di tensione sulla resistenza dello statore Rs del motore.
(3.06)
A seconda della precisione richiesta, per alcuni motori si può trascurare la resistenza dello statore spesso molto bassa. Quale risultato dell'integrazione, il flusso dello statore è una grandezza continuativa. Sebbene come si vede in Fig. 3.1 la tensione dello statore mostri un andamento impulsivo modulato in ampiezza, la parte reale ψα(t) e quella immaginaria ψβ(t) del vettore spaziale del flusso dello statore sono approssimativamente sinusoidali (Fig. 3.2a). In prima approssimazione, la traiettoria del vettore spaziale del flusso dello statore segue un percorso circolare. Il raggio del percorso circolare corrisponde all'ampiezza del flusso dello statore.

Fig. 3.2: Vettore spaziale del flusso dello statore del motore asincrono
a) Andamento temporale delle parti reale ed immaginaria
b) Traiettoria del vettore spaziale nel piano complesso
3.2 Calcolo del momento del traferro interno di un motore asincrono alimentato da inverter
Con i motori asincroni, si può calcolare il cosiddetto momento interno o momento del traferro dalle misurazioni di tensione o di flusso e correnti. Il momento del traferro interno è dovuto all'inevitabile frizione torsionale interna del motore e dalla coppia dell'albero. Ignorando la coppia frizionale, la coppia interna calcolata corrisponde alla coppia meccanica che può essere misurata con elevata precisione usando un torsiometro [3].
L'accuratezza della coppia calcolata dipende dal modello di calcolo che viene impiegato e dalla precisione dei parametri del motore usati a tale scopo. Il calcolo della coppia interna può essere utilizzato come informazione ridondante per completare il segnale di misura del torsiometro, poiché la sua entità dovrebbe essere almeno del medesimo ordine di ampiezza del momento meccanico. Inoltre, la coppia proporzionale di un motore elettrico può essere correlata con la coppia dell'intero treno di trasmissione misurata mediante un torsiometro. Per esempio, una potenziale applicazione è sul veicolo ibrido, perché il suo motore a combustione e quello elettrico agiscono sul medesimo treno di trasmissione. Mediante la coppia calcolata del motore elettrico si può determinare il momento del motore a combustione.
Dalla letteratura [2] è noto che la coppia interna dei motori asincroni si può calcolare partendo dalle correnti dello statore e dai flussi magnetici dello statore.
(3.06)
Qui, ρ rappresenta il numero di coppie di poli del motore asincrono. Le correnti ed i flussi sono rappresentati dai loro componenti del vettore spaziale. La Fig. 3.3 mostra l'andamento temporale delle correnti e flussi dello statore oltre al momento interno del traferro Mi calcolato da questi valori. Si vede chiaramente la pendolazione della coppia. L'alta frequenza di pendolamento della coppia è generata quale risultato dell'attività di commutazione dello inverter. È essenziale identificare correttamente il periodo della corrente fondamentale del motore per abilitare il calcolo del momento del traferro in Perception.

Fig. 3.3: Andamento temporale della corrente dello statore (iα, iβ), del flusso dello statore (ψα, ψβ) e del momento del traferro calcolato Mi