L’Università di Geisenheim ha sviluppato un’idea innovativa per il lavoro meccanizzato sui pendii ripidi: il robot per la viticoltura “Geisi”. Geisi sarà in grado di lavorare su pendenze fino al 70%, potrà essere controllato da remoto e non avrà bisogno di corde.
Il paesaggio delle regioni vinicole della Germania è caratterizzato dalla presenza di pendii molto ripidi; la percentuale dei pendii coltivati sta però diminuendo sempre più e nel 2010 costituiva soltanto il 9 per cento dei terreni coltivati. Ciò dipende dal fatto che sui pendii molto ripidi il lavoro è esclusivamente manuale e di conseguenza pericoloso, fisicamente molto impegnativo e con costi elevati. The Institute for Technology dell’Università di Geisenheim ha deciso di porre rimedio a questa situazione cercando di semplificare la viticoltura sui pendii ripidi. Un team guidato dal Professor Schwarz ha sviluppato un’idea innovativa per il lavoro meccanizzato sui pendii ripidi: Geisi.
A differenza degli strumenti utilizzati in precedenza per la coltivazione meccanizzata, Geisi è stato progettato per essere controllato a distanza e senza l’uso di corde su pendenze fino al 70 per cento. Ciò consente un notevole risparmio in termini di costo del lavoro, garantendo allo stesso tempo un valore aggiunto in termini di sicurezza. Un esercito di robot instancabili specializzati nella viticoltura meccanizzata su pendii ripidi offre vantaggi a lungo termine, grazie alla capacità di svolgere autonomamente compiti specifici quali la protezione delle colture, la pacciamatura o la rimozione di fogliame. Geisi sarà disponibile a un prezzo nettamente inferiore a quello dei sistemi meccanizzati utilizzati in precedenza per lavorare su pendii ripidi.
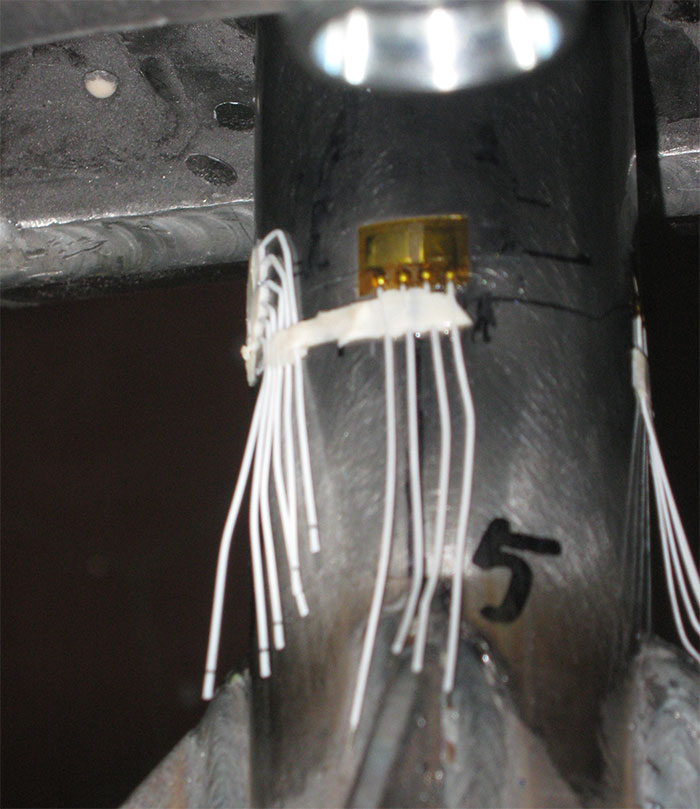
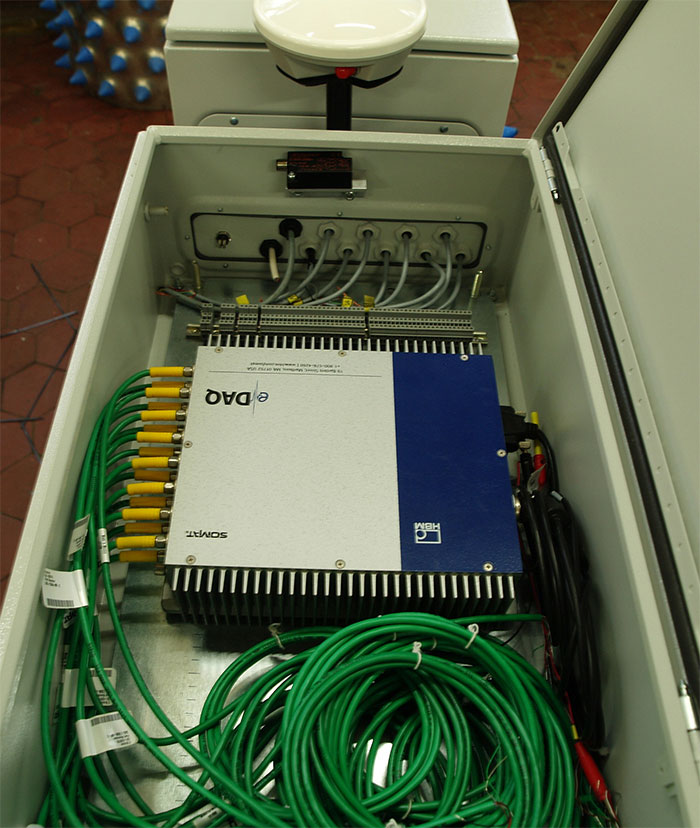
Per poter realizzare i loro obiettivi, i responsabili del progetto hanno chiesto la collaborazione di HBM. L’autonomia e l’affidabilità di Geisi su pendii ripidi dipendono anche dall’uso di estensimetri e dal sistema di acquisizione dati mobile e robusto Somat eDAQ prodotto da un leader nel campo degli strumenti di prova e di misurazione.