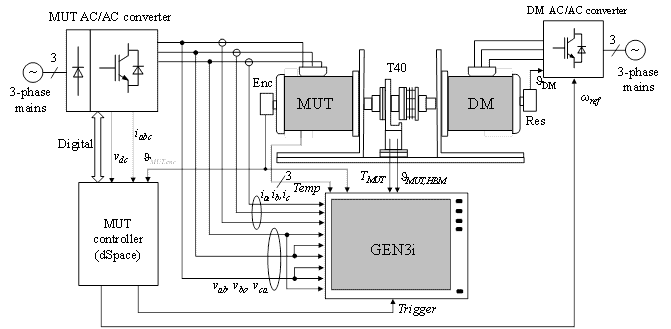
L’apparecchiatura di prova usata per la mappatura di efficienza e perdita è illustrata in fig. 1. È formata dai seguenti elementi principali:
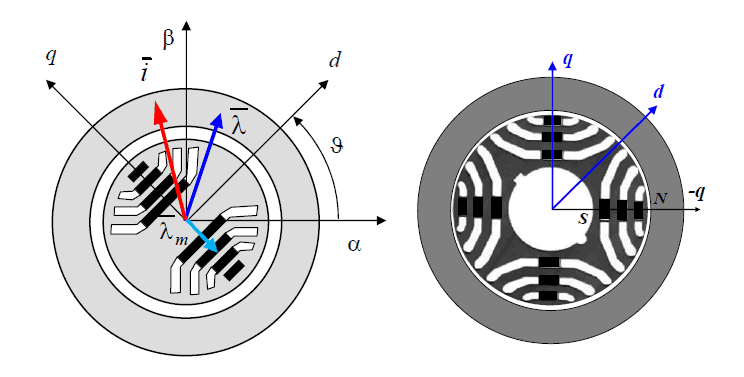
- Il motore sottoposto a test (MUT) è un motore a magnete permanente interno (IPM)
- Il controller del motore è una scheda dSpace con interfaccia analogica/digitale dedicata
- Il motore di azionamento (DM) è un motore a magnete permanente (PM) a velocità controllata alimentato da un convertitore bidirezionale il cui riferimento di velocità è fornito dalla scheda dSpace con uscita analogica dSpace DAC (convertitore da digitale ad analogico). Un’altra soluzione è usare un’interfaccia CAN o RS422, a seconda anche della capacità di comunicazione del convertitore che alimenta il DM
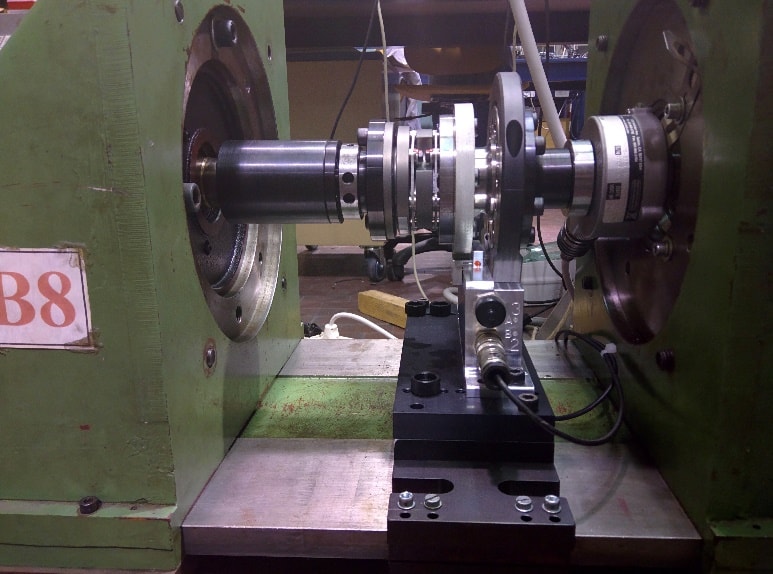
- La coppia viene misurata con un sensore di coppia HBM T40 ad alta precisione (fig. 2), che determina la coppia dell’alberino e anche la posizione dell’alberino, con una risoluzione di 1024 impulsi/giro (uscite di tipo encoder). Il sensore di coppia è montato tramite accoppiamento meccanico tra l’alberino MUT e l’alberino DM. I dati vengono trasmessi al sistema di misurazione per mezzo di un trasformatore rotante.
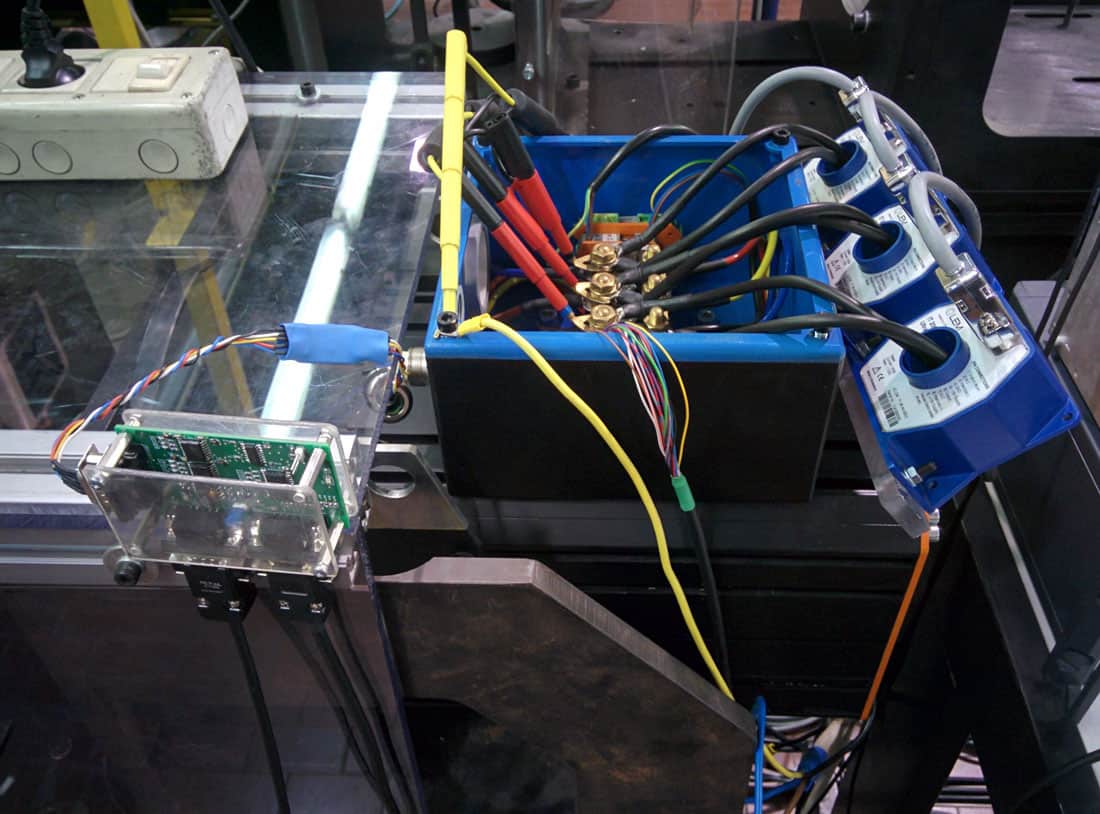
- Le correnti di fase vengono misurate con grande precisione, da sensori LEM esterni (fig. 3) alimentati da una scatola che gestisce i sensori di corrente e genera le uscite acquisite dal registratore di dati HBM con i canali di acquisizione ad alta velocità, con una frequenza di campionamento di 2M di campioni/s. Le cadute di tensione sugli shunt LEM sono inviate al Gen3i con i cavi BNC.
- Le tensioni da linea a linea MUT sono misurate direttamente dal registratore Gen3i con i canali di acquisizione ad alta tensione/alta velocità con una frequenza di campionamento di 2M campioni/s. In questo modo, le tensioni acquisite sono gli effettivi impulsi PWM applicati alla macchina.
- Oltre alla posizione del rotore fornita dal sensore di coppia T40, Gen3i misura anche la posizione del rotore con un encoder incrementale impiegato anche dal controller del motore (come illustrato in fig. 1). Una scheda splitter esterna riceve impulsi dall’encoder e li invia al controller del motore e al Gen3i con isolamento galvanico.
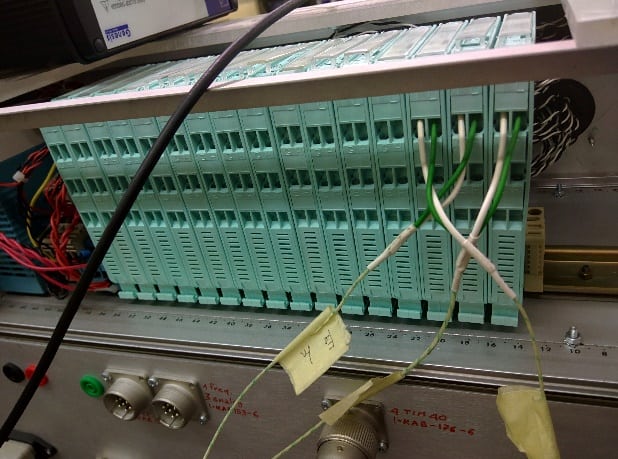
- La temperatura del motore è misurata per mezzo di tre termocoppie. Le termocoppie sono lette dagli amplificatori a isolamento programmabile (fig. 4), con uscite fornite ad una scheda di acquisizione a bassa velocità di Gen3i.
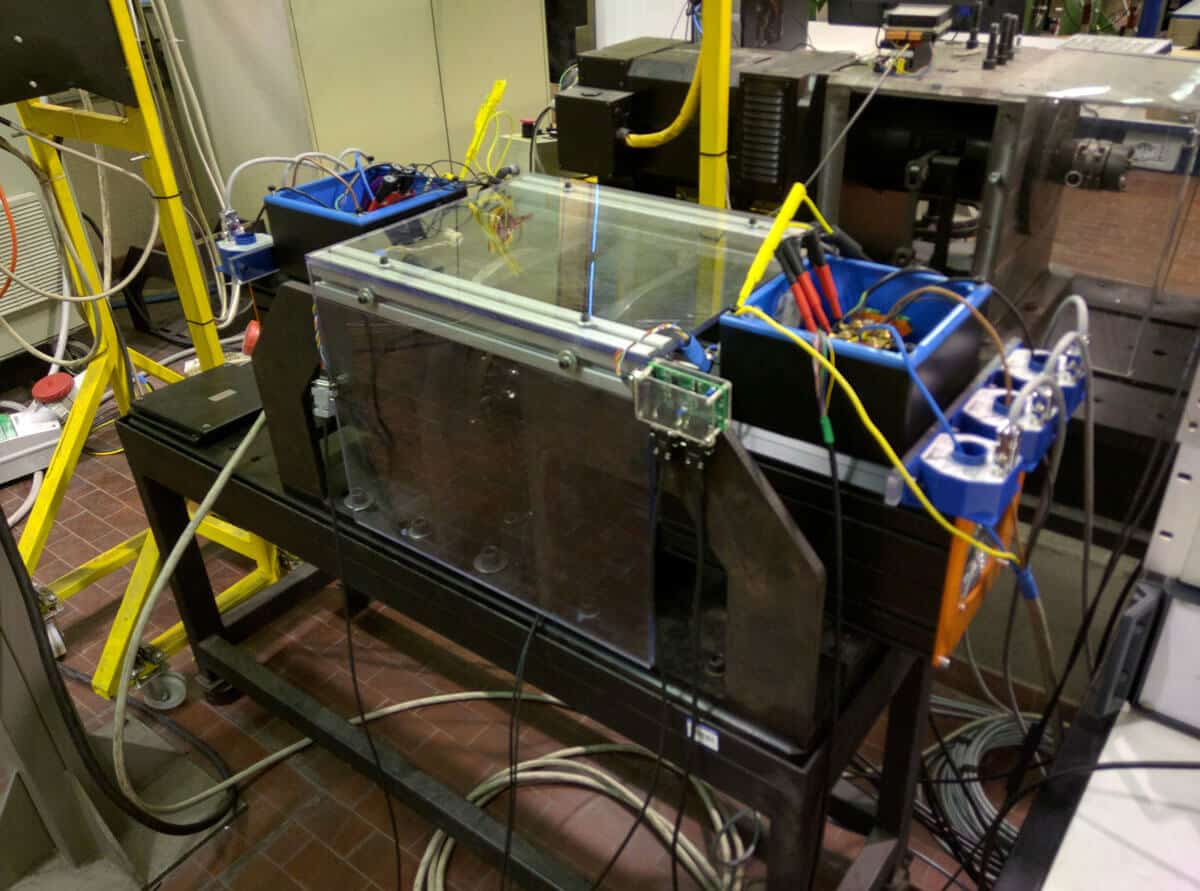
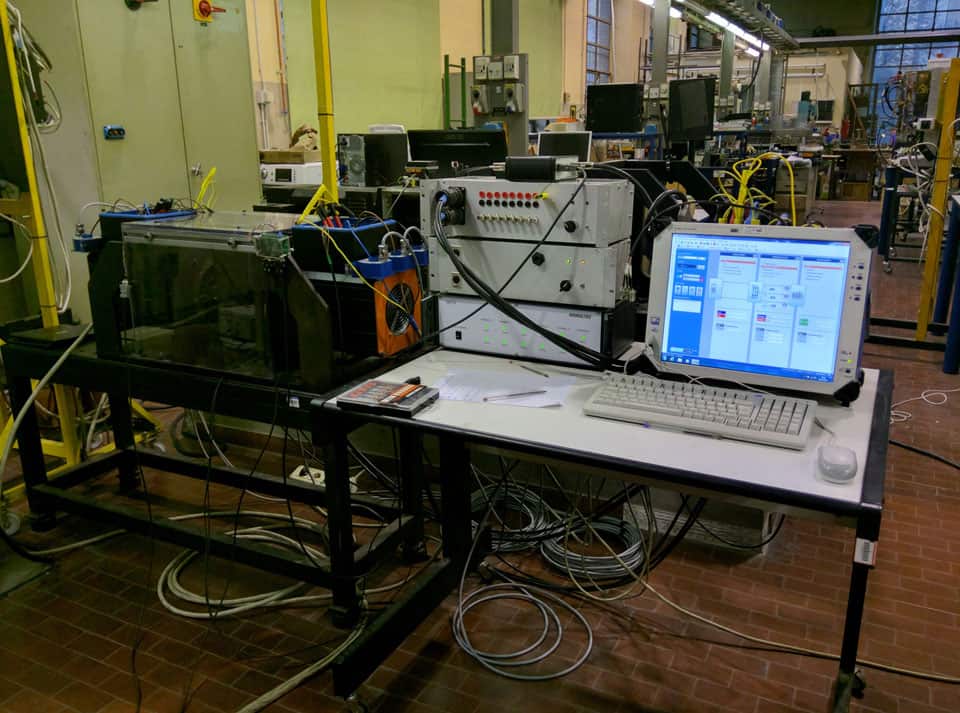
MUT e DM sono visualizzati in fig. 5, mentre in fig. 6 è raffigurata una vista generale dell’intera attrezzatura di prova, compreso il registratore di dati HBM Gen3i.





 è la temperatura media dello statore calcolata come valore medio delle temperature k misurate dello statore.
è la temperatura media dello statore calcolata come valore medio delle temperature k misurate dello statore.