Misurazioni della potenza precise ed estremamente dinamiche
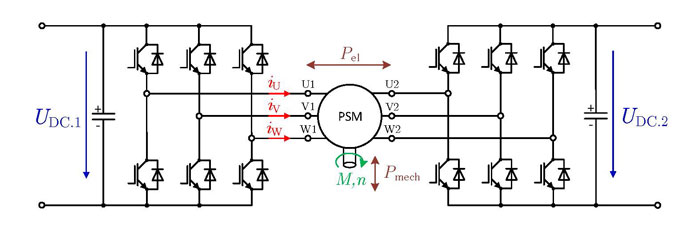
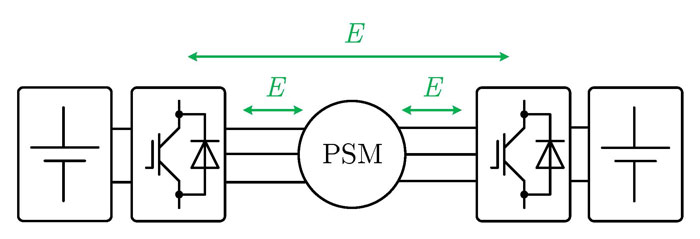
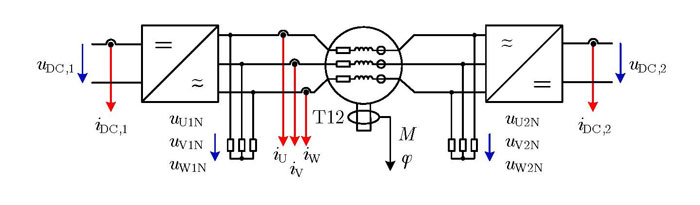
Per la valutazione e le prove dei motori elettrici e delle strategie di controllo corrispondenti nelle applicazioni di mobilità industriali ed elettriche sono necessarie misurazioni della potenza precise ed estremamente dinamiche. In questi campi di applicazione il sistema elettrico è costituito solitamente da un inverter a due livelli, da una macchina elettrica trifase e dall’alimentatore corrispondente.
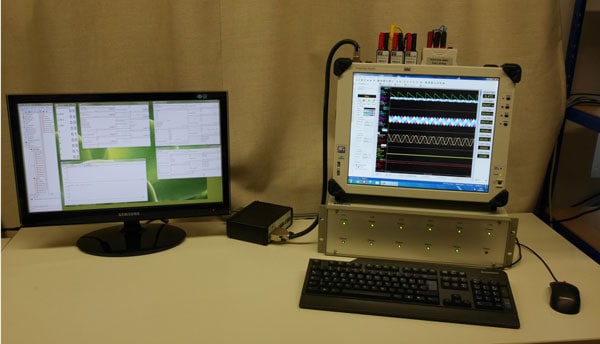
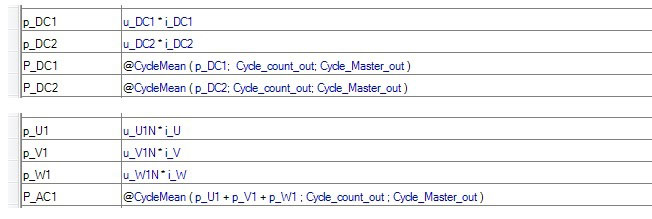
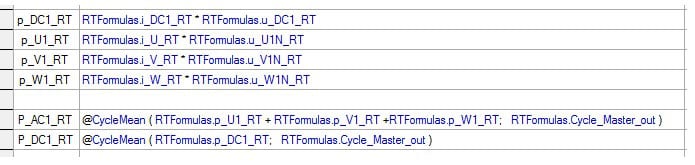
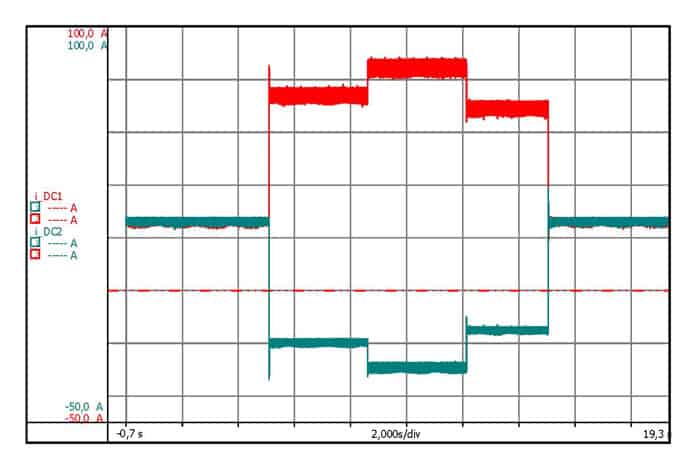
Questo articolo inizia con l’analizzare nel dettaglio la topologia dell’inverter a due livelli (DTLI). Successivamente, vengono descritte le operazioni di acquisizione delle variabili meccaniche ed elettriche tramite il sistema di acquisizione dati GEN3i e le operazioni di calcolo dei valori di potenza in tempo reale.