Il modo migliore per misurare molti degli aspetti di cui sopra è utilizzare la mappatura dell’efficienza e le prove di tipo dinamometrico. A tutti interessa aumentare l’efficienza del proprio sistema; per farlo, è importante disporre dei dati grezzi perché in questo modo, se qualcosa non va per il verso giusto, è possibile fare riferimento alle prove precedenti ed effettuare un’analisi approfondita in un programma post-elaborazione come MATLAB. Inoltre, tutto questo è molto importante per le prove dinamiche perché in fase di caricamento dinamico o di prove sui cicli di funzionamento, senza i dati grezzi la misurazione dell’efficienza non può essere abbastanza precisa.
All’inizio delle prove si ha una tensione pre-impostata del bus DC, seguita da una velocità pre-impostata.
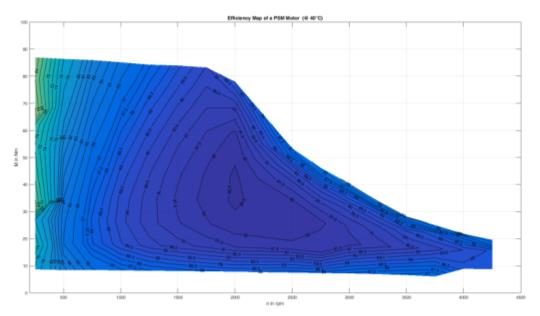
La macchina viene poi caricata con una determinata coppia. Questa operazione viene eseguita per tutte le coppie desiderate e per tutte le velocità disponibili nella gamma della macchina. Si ottengono così le efficienze per tutti i punti impostati e quindi una mappa dell’efficienza. Questi punti vengono poi portati a un intervallo di temperatura specifico. In alcuni casi è necessario aspettare che la macchina si raffreddi per poter registrare un punto di prova. È qui che il sistema eDrive Testing di HBM consente di risparmiare molto tempo perché registrare i punti di prova in un determinato numero di cicli invece che in pochi secondi fa sì che la macchina impieghi meno tempo a riscaldarsi.
Spesso, gli utenti provano le macchine al loro limite con il risultano di distruggerle, o quasi. Cercano di spingere la macchina alla massima velocità per capirne i limiti meccanici. La capacità di effettuare un trigger e di avere a disposizione dati memorizzati in un buffer consente ai ricercatori di capire non soltanto dove la macchina non ha funzionato, ma anche perché non ha funzionato.