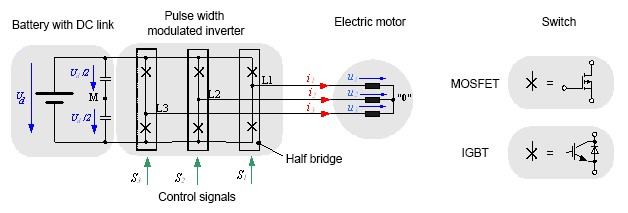
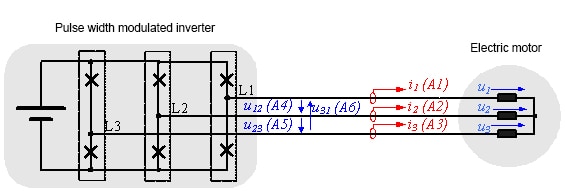
電動モータの中性点 (スターポイント)にアクセスできない場合、相電圧(u1, u2, u3)を直接計測することはできません。しかし、「仮想中性点」を使用すると、相電圧の計測が可能です。図3.1に示すように、仮想中性点は3つの同一の高インピーダンス抵抗器で構成されます。PWMインバータが出力する瞬時電力は、これらの抵抗器の相電圧と相電流(i1, i2, i3)より計算できます。

(3.01)
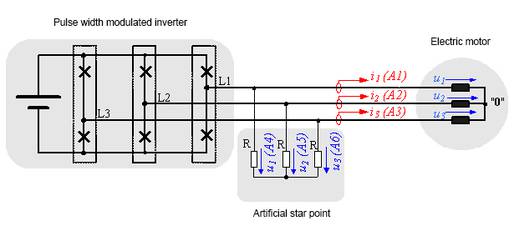
図3.2:仮想中性点を使用した電力計測を示す図
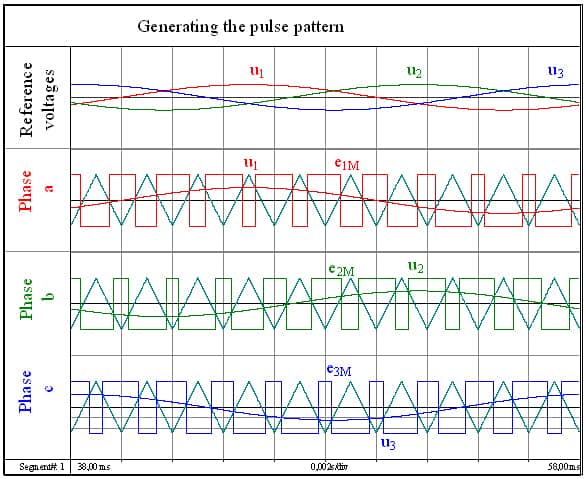
図3.3は、仮想中性点を使用した計測結果を示します。この場合、PWMインバータは非同期モータに電力を供給します。電流と電圧は、3本すべての線で計測します。PWMインバータの電圧がパルス状であるにもかかわらず、電流はほぼ正弦波状です。したがって、電力計測における平均値算出のサイクル時間を決定するために、電流信号を使用します。電流信号の周期と時間関数Cycle i1曲線を比較することにより、サイクル時間が正しく検出されたかどうかが簡単にわかります。
図において、3つの線間電流の間には120度の位相差があります。非同期機では通常、電圧に対して電流は遅れ位相となります。
PWMインバータが出力する全有効電力は、瞬時電力の平均値を計算することにより得られます。Perceptionにおける計算手順を式3.02に示します。
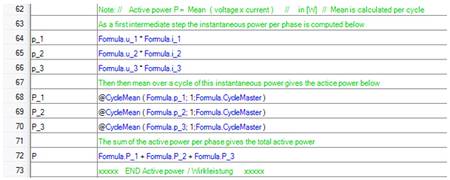
(3.02)
皮相電力Sは、電流のRMS値と電圧のRMS値の積です。各RMS値は1周期にわたって計算されます。周期の長さは、cycleDetectコマンドを使用して電流曲線i1から得られます。
皮相電力は、Perceptionによって以下の式を使用して計算できます。
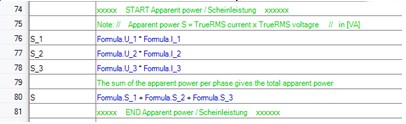
(3.03)
無効電力Qは、各線について次式により計算されます。

(3.04)
全無効電力は各無効電力の総和です。無効電力は、Perceptionによって以下の式で計算できます。
(3.05)