



押圧方向の力のみを記録できるように設計された変換器には、通常、荷重を加えるための凸状のアタッチメントが装備されています。
多くのモデルにおいて、このロードボタンに力の印加するための補助部品として、ロードアプリケーションエイドが用意されています。これには、例えば下図に示すスラストピースが含まれます。

この種のスラストピースは、荷重点に直接配置します。スラストピースと力センサの間には異物が挟まらないように注意します。スラストピースには回転軸受が設けられているため、変換器に対する角度が変化し、変換器に曲げモーメントとトルクはかかりません。
この種のスラストピースを使用せずに力センサを設置する場合、凸状の力の印加領域に接触するコンポーネントは以下の要件を満たす必要があります:
- HBMは43 HRC以上の硬度を推奨します
- 加工物は接地するものとします
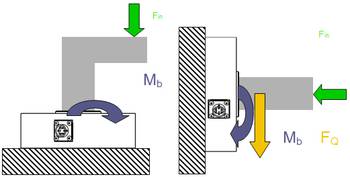
- 取り付けは、合わせ部品を持ち上げないようにし、変換器が衝撃を受けないようにします
- 可能であれば、合わせ部品を回転できるようにして自在軸受を備え、曲げモーメントとトルクが発生しないようにしてください
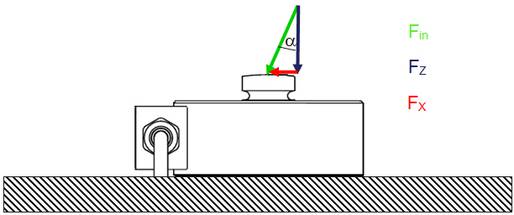
力センサは通常、用途に合わせた取り付け用の構造内に配置されます。したがって、力は、力センサの下にある構造の内部へと導かれます。しかし、水平方向の取り付けも考えられます。その場合、変換器は構造に対して確実に固定します。
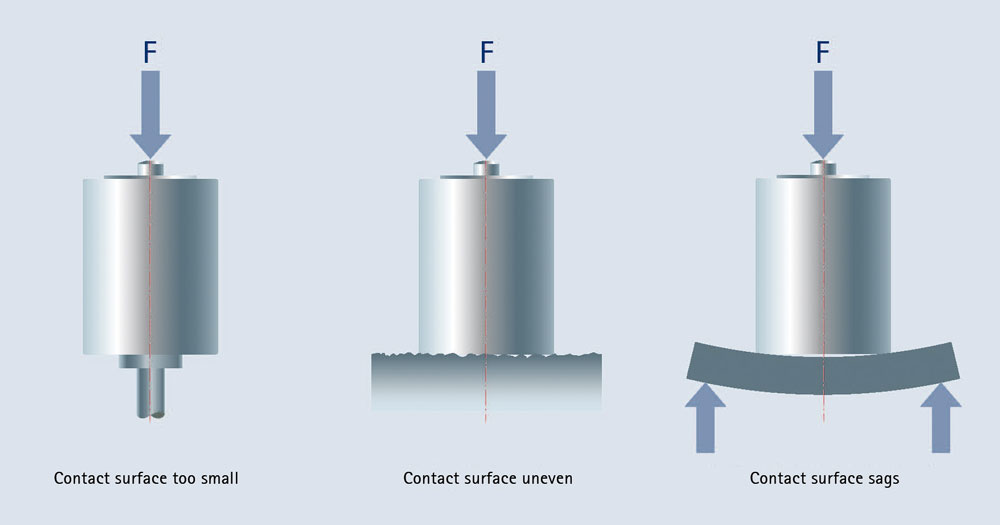
いずれにせよ、変換器の底部を取り付ける構造要素は、力を受けたときの変形がわずかで済むように設計しなければなりません。そのため、十分な剛性を確保する必要があります。
また、表面を均一にすることも重要です。許容できる最大の不均一度は、0.005 mmです。土台となる面を均一にすることで、力センサの変形量は、メーカーが保証する計測精度を達成できる範囲内に抑えられます。
土台となる構造は変形しにくく、力センサよりも径を大きくする必要があります。下部構造が著しく変形したり、表面が小さすぎたり、あるいは力の印加が不均一だったりすると、変換器の設計時に想定していない状況が発生します。これにより、感度や線形性やヒステリシスに関連する技術データが変化する可能性があります。