テスト装置について
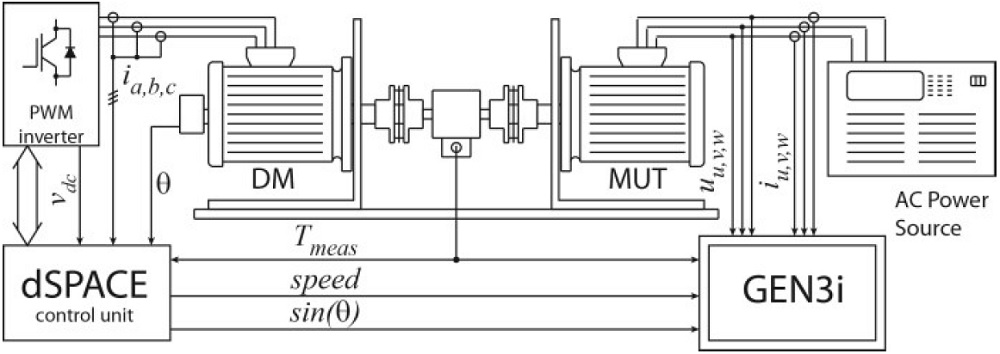
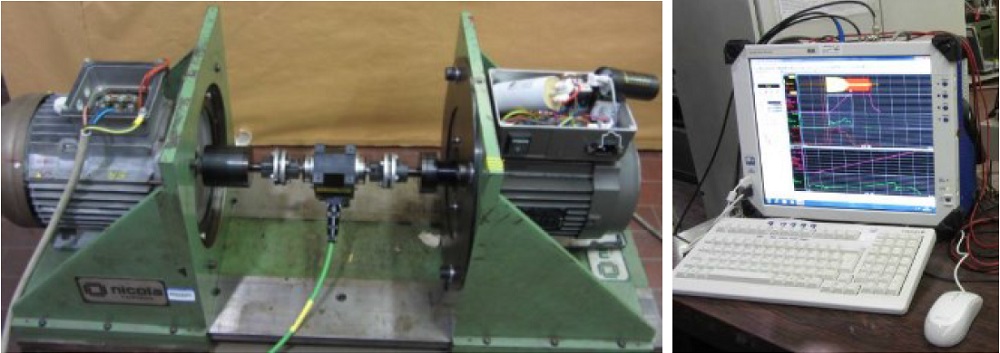
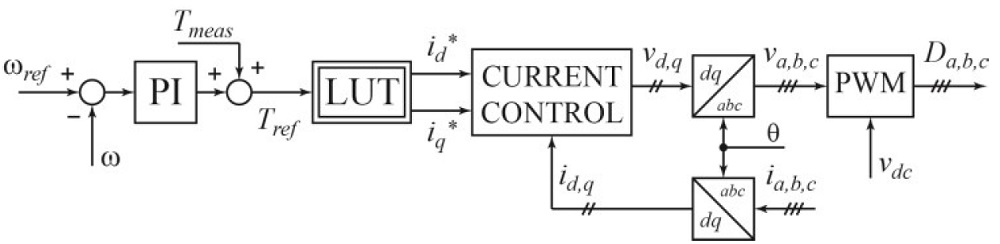
このテスト装置は、概要ブロック図の図1が示すように様々な構成要素から出来ています。 テスト用モータと駆動モータは、図2の左側に示されているように、機械的支持上の垂直平板を使用して取り付けられており、それらのシャフトはトルクセンサを通して連結されています。 機械構造とカプラは、テストで発生する機械的負荷に耐久できる強度を持っています。 トルク信号はデータ記録用の計測と、次のセクションで説明するように、駆動モータ速度制御システムにも提供されます。 使用したトルクメーター(Vibrometer TM208)の特性は以下の通りです: 定格トルク20Nm、オーバーロードトルク40Nm、精度0.1%、帯域幅1kHz。
駆動モータはテストに必要なトルクと速度を提供できるモータなら種類は問いません。 提案のテスト装置での駆動モータの仕様は、2.2kW、14Nm@1500 rpm、同期リラクタンス(SyncRel)モータ、PWMインバータ駆動のブレーキ付です。 駆動モータはdSPACE DS1104制御装置によって速度制御されています。 テスト用モータには、テスト中の電圧制御のため正弦波を持つ電源が供給されます。
テスト装置の中心は、図2(右)に示されたHBMのデータ収集システムGEN3iです。12チャンネルの絶縁入力による2MS/sの同時連続データ収集が可能です。 非常に優れた連続サンプリングと計測精度により、短期間の変動や過渡現象の全データを含め、切れ目のない長期間のデータ収集が可能です。
データ収集システムGEN3iによる測定した物理量は以下の通りです:
- テスト用モータの3相電流iUVWと3相電圧uUVW;
- 軸トルク、速度、および同期信号sinθ (最後の2つの信号はdSpaceシステムから提供されます)
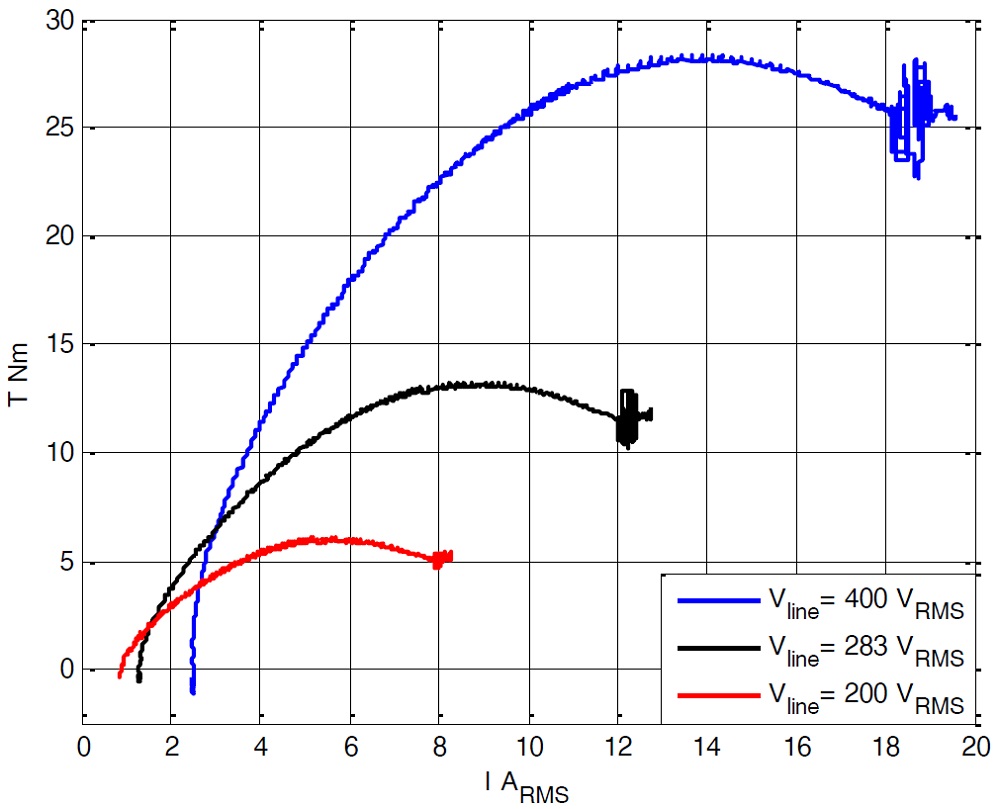
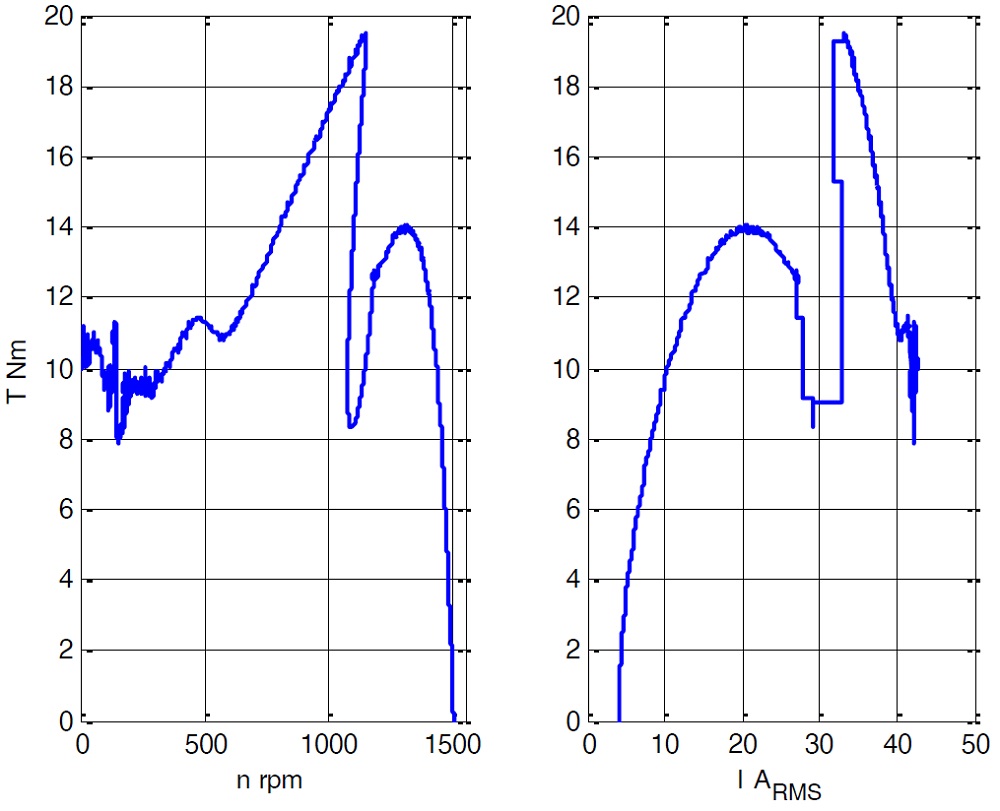
この高速データ収集システムによって提供される機能の一例をあげれば、3相誘導電動モータのトルク対速度の特性を決定するのに必要となる電気的/機械的な物理量を図3に示します。
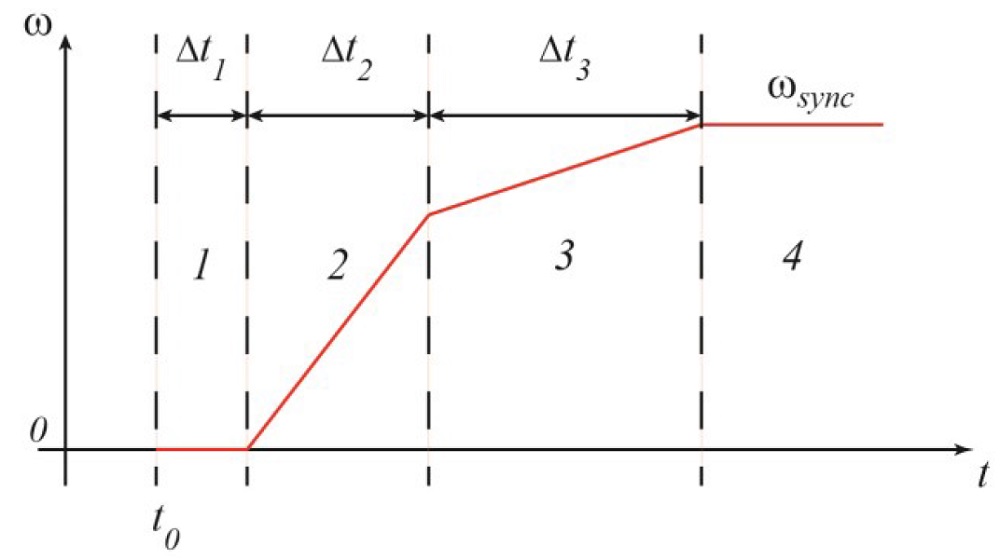
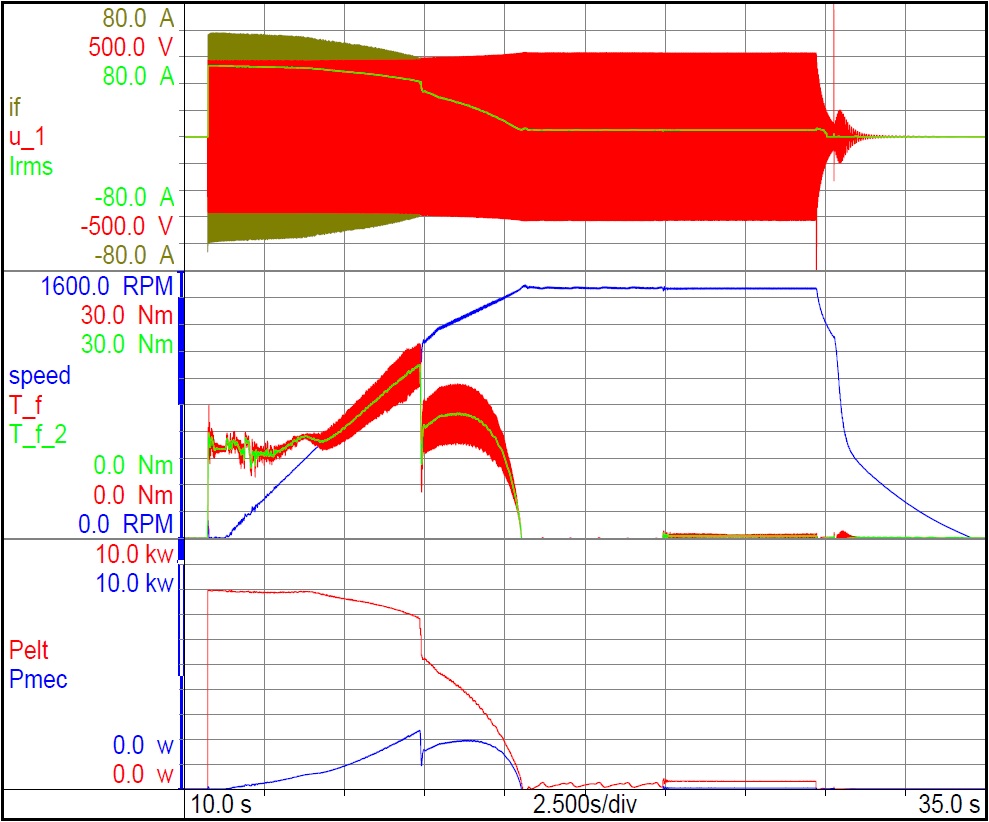
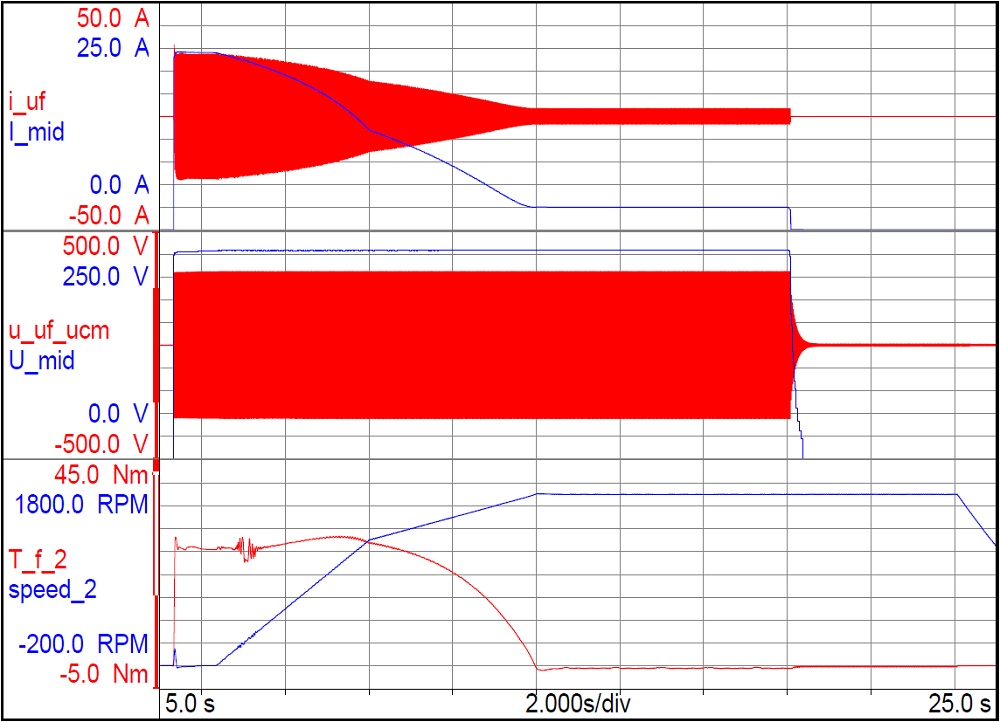
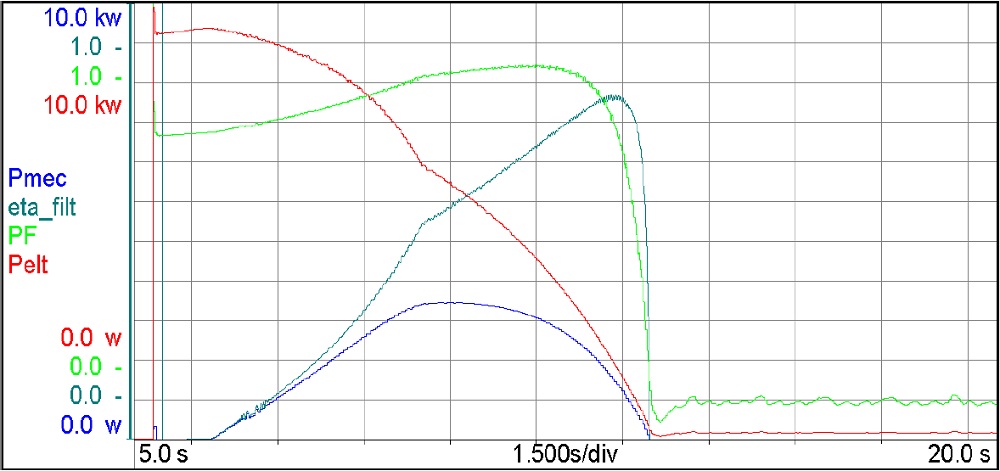
高速データ収集機能に加えて、データ記録装置はデータのフィルタリングや数学的な演算の豊富な機能を持っています。 管理するデータ量が膨大になるので、直接にデータ収集システム[8]から必要な物理量を抽出するためには、必要不可欠な機能です。 例として、三相誘導電動モータのスタート時に計算された物理量を図4に示します。 良い結果を得るためには、テスト用モータに負荷を与える駆動モータシステムの動的性能と高速収集データシステムを、組み合わせて活用します。次のセクションで駆動モータの特性と性能について説明します。