ケースA
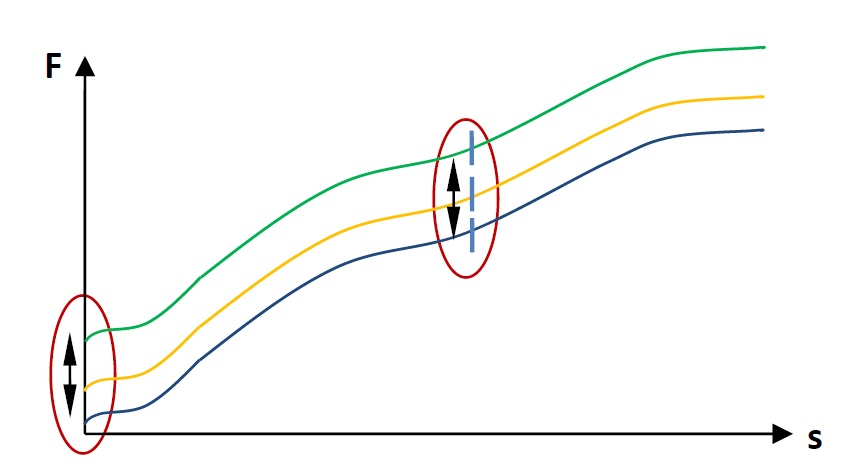
変位依存の力Fが限界値に準拠するためにチェックされ、ストロークのストロークからの力のオフセットは破壊的です。力制限値は、各ストロークの動きに合わせて調整されなければなりません。
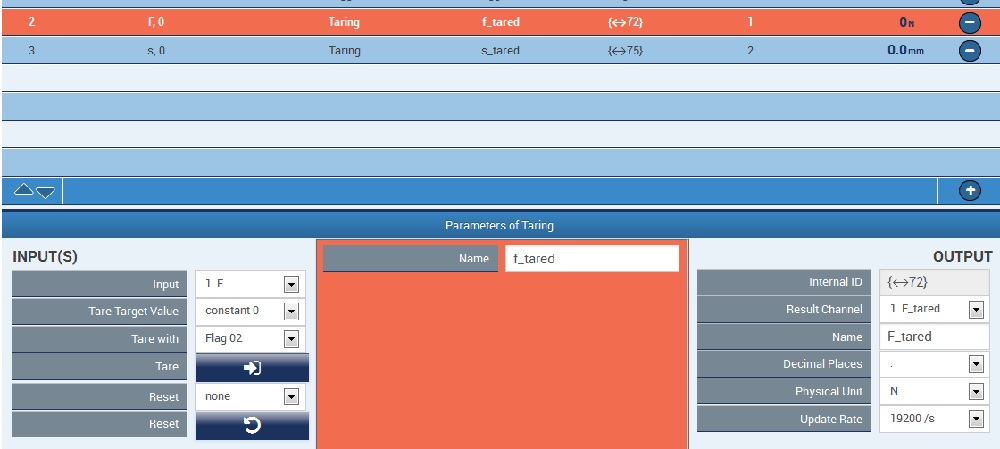
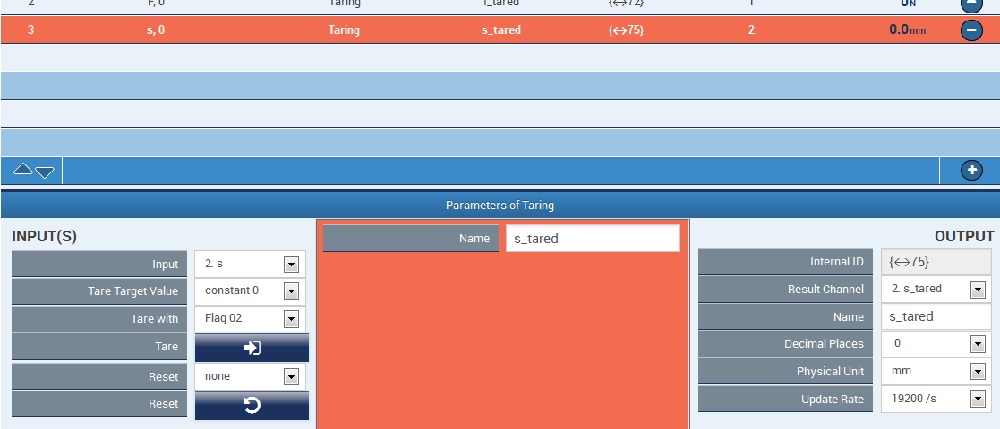
ストロークの移動時の力Fと変位sが測定されます。オフセットすることなく、測定量のランダムなオフセットを補償するために、新しいF_taredとs_tared信号が生成されます。
ケースA
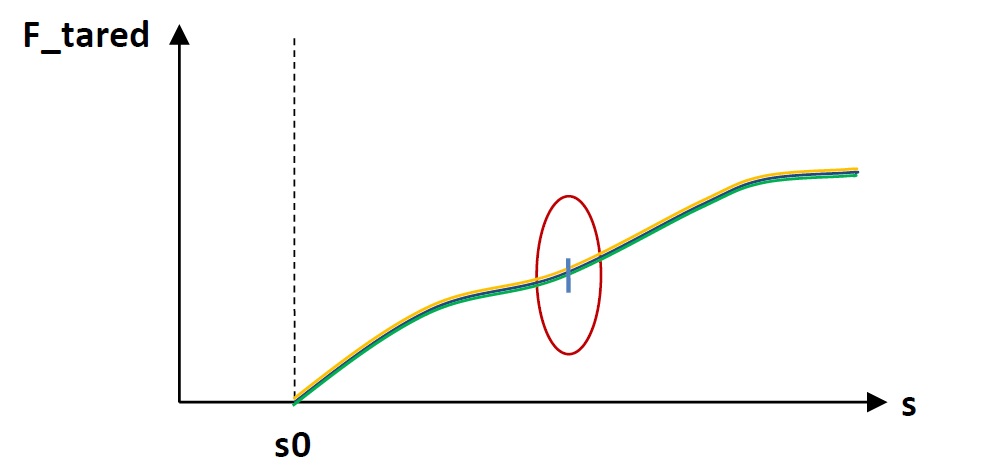
秒=s0 : 力は変位軸上のポイントsでゼロに設定されます。
ケースB
力と変位は、力F = F0はゼロに設定されています。
ケースA
変位依存の力Fが限界値に準拠するためにチェックされ、ストロークのストロークからの力のオフセットは破壊的です。力制限値は、各ストロークの動きに合わせて調整されなければなりません。
2つのグリフ「トリガー」および「風袋を「点s0のゼロ以下に力を設定するために使用されます。S0下の力曲線をゼロにする意味はありません。
ケースB
オフセットのずれを補正するために、新しい力ゼロ点は、力F0よりむしろ変位によって決定されるべきです。
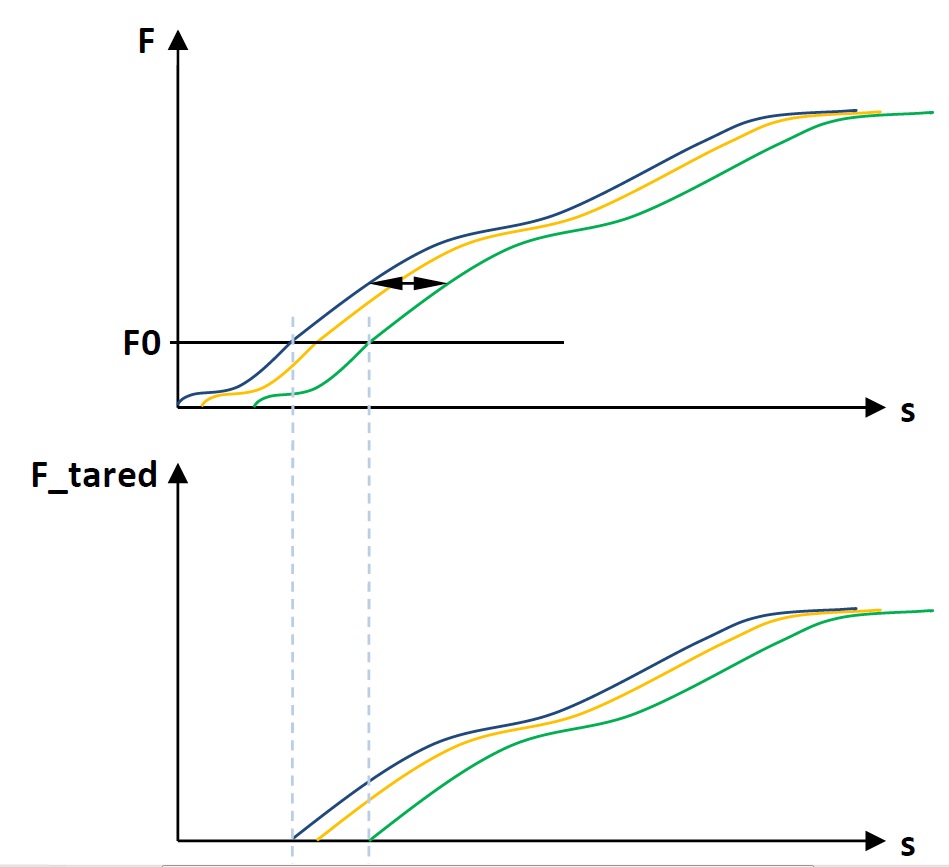
ケースAは、変位ゼロ点も移動する方法を示しています。
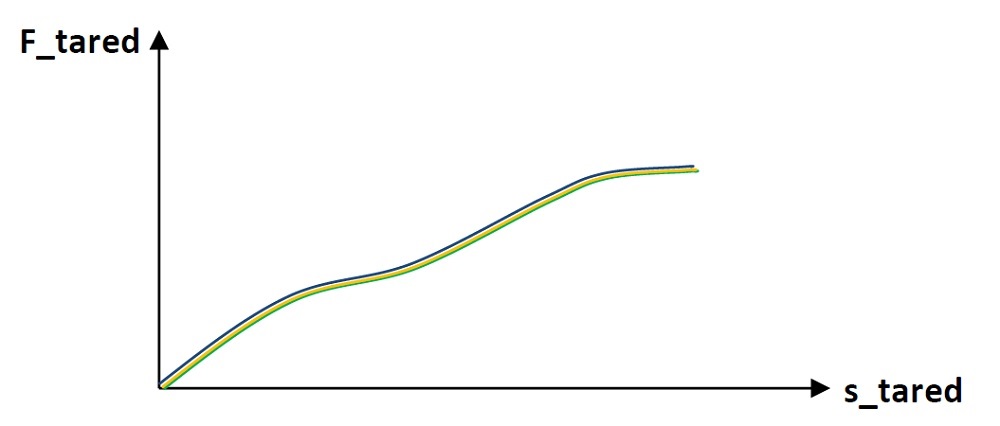
同じ条件(F= F0)は、これを行うために使用され、どちらも数量、力と変位は、新しいゼロ点を持っています。
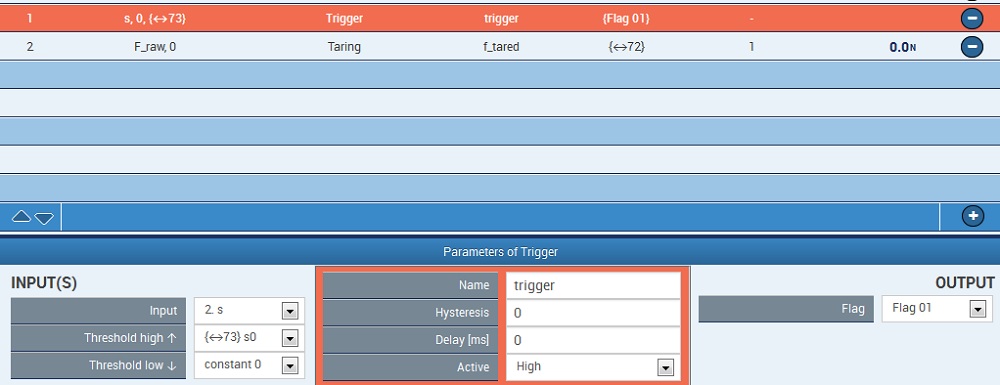
ケースA
この場合は5mmで、一定な信号を返しS0にします。
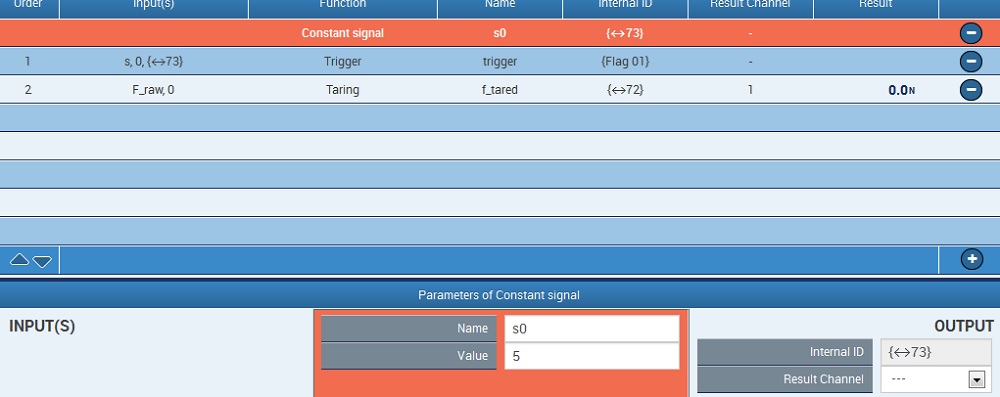
変位の0〜5mmの範囲であれば、トリガーブロックが出力「Flag1」を設定します。
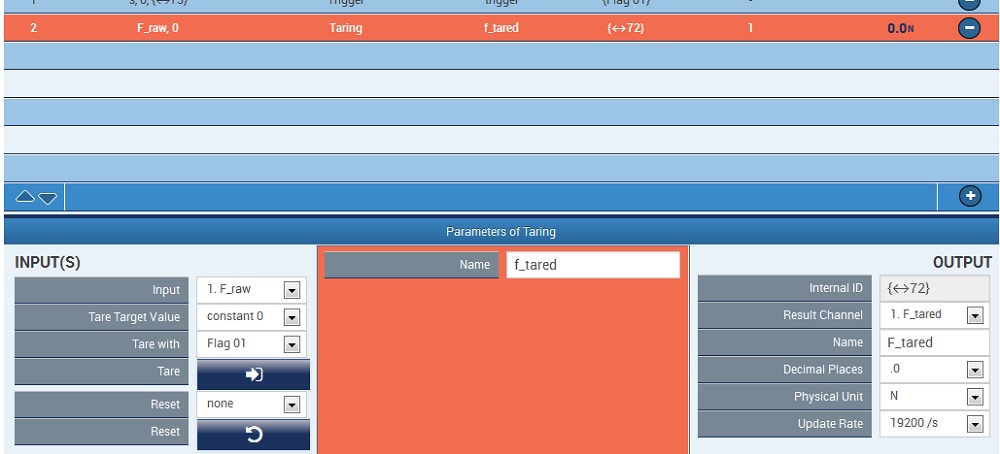
最後に、トリガーブロックはゼロに5ミリメートル以下の力「F_raw」のRowの値を設定します。
F_taredオフセット除去と力の値です。
ケースB
トリガブロックが、現在、力F0に対してFをチェックします。
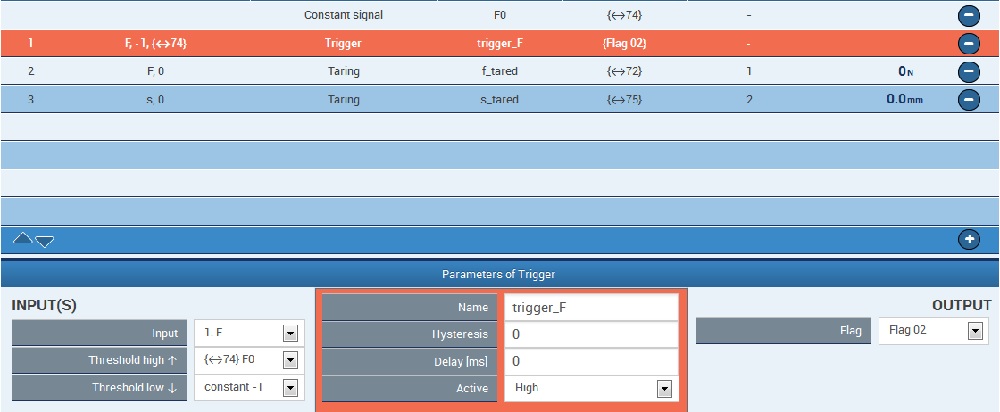
力と変位は、両方の信号「Flag02」とゼロに設定されています。
ここに記載した事例は、お客様にご参照いただくためのものです。いかなる形でも、保証や賠償の対象にはなりませんので、ご了承願います。