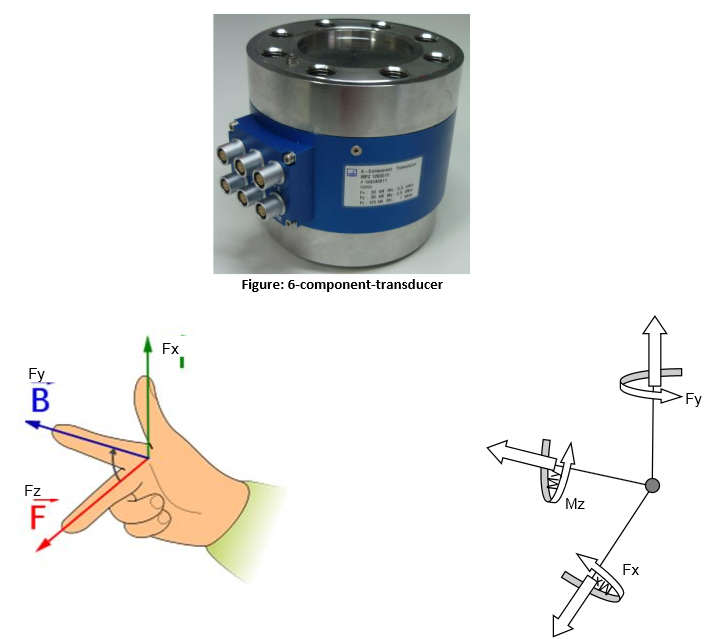
航空宇宙、機械·自動車のテストエンジニアからの要望で、HBMは特注仕様のセンサーを作りました。このタイプのセンサは、力とトルク計測を行い、マルチコンポーネットと軸センサと呼ばれています。下記の画像はa6コンポーネットセンサです。
PMXマトリックス補正
この説明では、行列補償を用いて測定した値のクロストークを補償する方法について説明します。この例では、マルチコンポーネットセンサが使用され、力およびトルク値を測定することができます。
必要な材料
例を行うために、以下のコンポーネットが必要です。
- 1×PMXシステム(サプライ)
- 1×センサ(6コンポーネットセンサ)
- 1×キャリブレーションプロトコル(係数補正行列)
はじめに
HBMはセンサだけでなく、いわゆる補償マトリックスも提供しています。マトリックス自身は、構成部品間(Fx対Fyなど)のクロストークまたは相互干渉を示しています。 UFXやUFYなどはmV / V単位で計測される生信号です。 K11、K12...は係数です。
マトリックスを使用して計測量を再計算すると、X、Y、Z方向に完全に補正されたトルク値が得られます。FX、Fy...は、配信プロトコルに従って、NまたはkN単位で、補正された真の出力値となります。マトリックスの例を以下に示します。
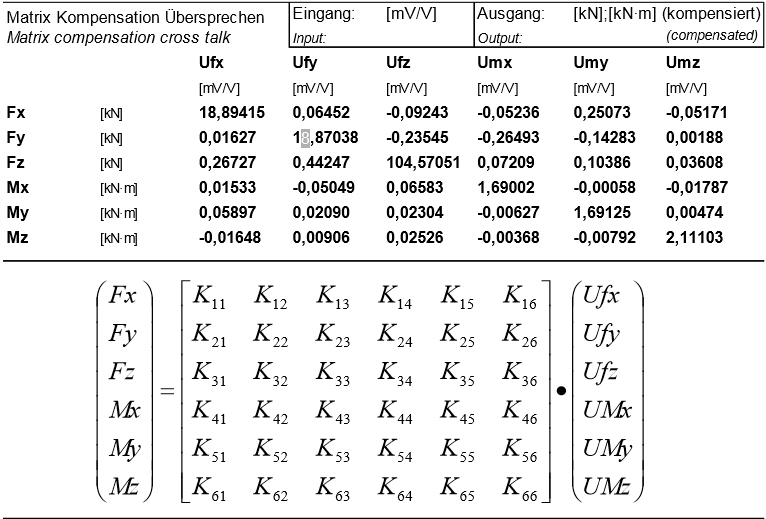
上図に示すように、センサ信号(UFX-UMz)はマトリックスの係数で乗算され、最終的にはライン毎に合計されます。結果は力とトルクの値(FX- MZ)です。この結果は、デバイス上で直接出力するか、または、システムで利用できるようにアイソクロナスとしてパラメータ化することができます。
TEDS仕様に関するヒント
信号を変換する必要がないため、TEDSを使用して異なる係数を使用します。これらの係数は、キャリブレーションプロトコルで見つけることができます。
マトリックス補正の設定
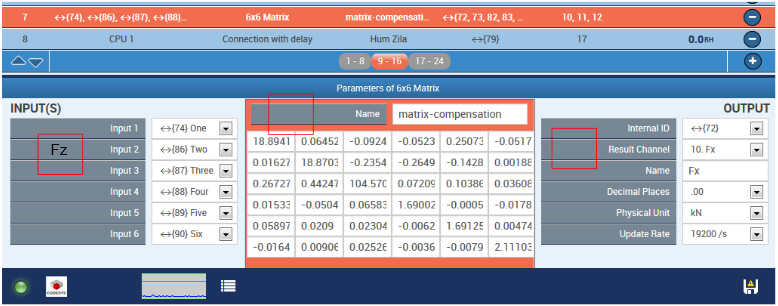
WebブラウザでPMXを開き、算出されたチャンネル下に新しい関数を追加します。6x6マトリックスを選択します
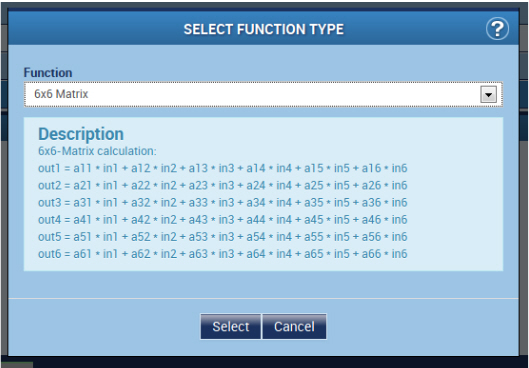
特定の数値を入力できます。
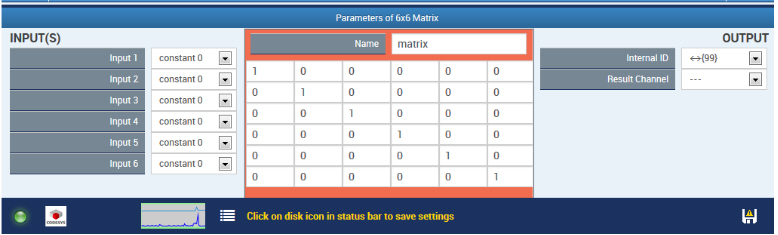
最初に補償されなければならない信号の入力チャンネルを選択します。(1)
次に、PMXマトリックスに所定の係数マトリックスから値を入力します。(2)
最後に、信号出力チャンネルを選択します。(3)
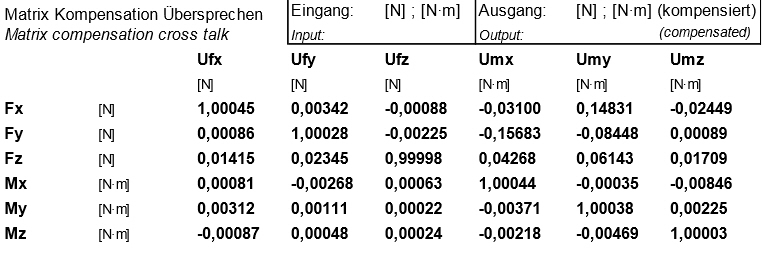
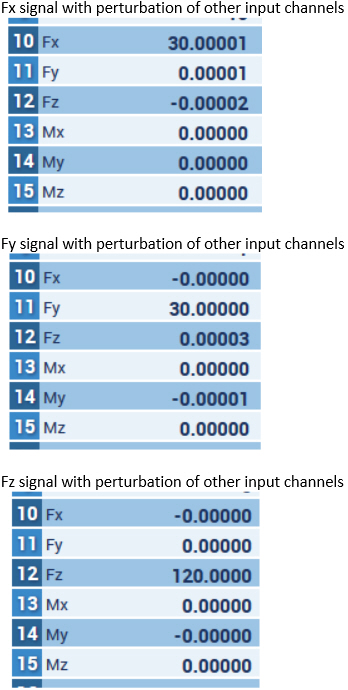
出力の結果
出力はWebブラウザに表示できるように、この例では内部チャンネルにマッピングされ、測定結果は摂動がマトリックスによって除外されています。
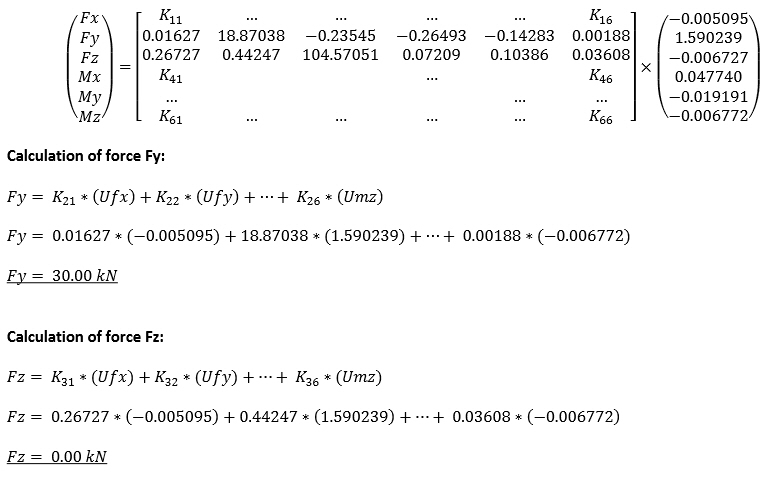
計算例
与えられた入力信号によって力「Fy」と「Fz」の計算例を表しています。
免責事項
ここに記載した事例は、お客様にご参照いただくためのものです。いかなる形でも、保証や賠償の対象にはなりませんので、ご了承願います。