はじめに
Wが変位に渡って力Fを積分することで測定されます
積分の積分の開始と終了は、イベントで決定されます。デジタル入力には、固定変位、力の値、信号のエッジが使用されます。
測定を行うためのPMXと、力/変位の統合作業
Wが変位に渡って力Fを積分することで測定されます
積分の積分の開始と終了は、イベントで決定されます。デジタル入力には、固定変位、力の値、信号のエッジが使用されます。
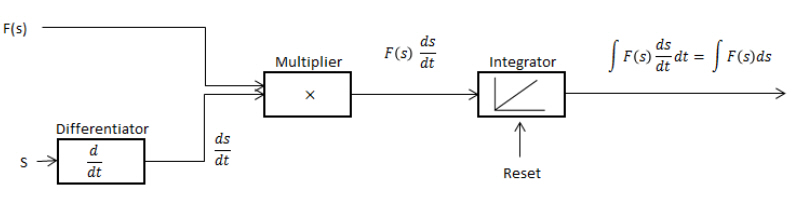
変位の積分は、第一時間に基づいて変位を導出することによって達成されます。
Fを乗じて再度、時間と統合します。
s1からs2への変位上の統合
この場合、 s=s1 と s=2は、統合の開始と終了を決定します。変位軸上のこれらの点はいずれにしても、プロセスの間に到達する必要があります。それ以外の場合は先頭や末尾が検出されません。

最大値を計測します。これは便利で、変位のフルスケールが未確定であるか、確実でない場合に行います。
統合が始まり、変位軸s=s1に同じ点で終わります (s=s1: W = ∮F(s) * ds)
作業は例えば、ばね緩和に、戻り行程中に低下することがあります。最大値はピークブロックに保持されます。

例Aのグラフ詳細:
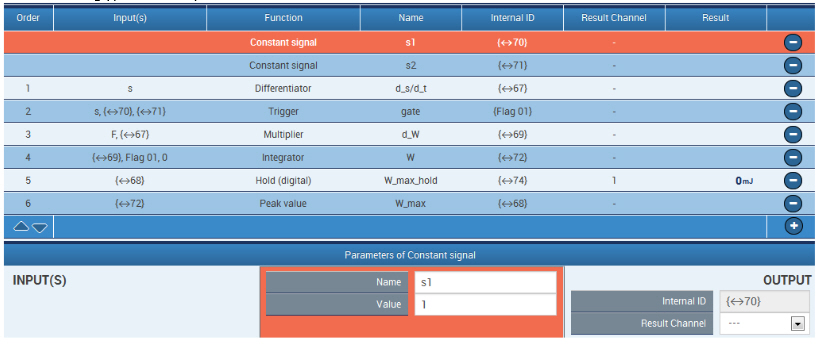



Holdブロックは、計算の順にピークブロックの前に来ることに注意してください。
次に、「Flag_01」第ホールド機能における結果とのエッジがピークブロックがリセットさせます。

例ではHoldブロックは、すでに復帰時にリセットされます。値はより長い保持する必要がある場合、例えばブロックは、デジタル信号によって、または追加トリガーブロックによって外部リセットすることができます。
ここに記載した事例は、お客様にご参照いただくためのものです。いかなる形でも、保証や賠償の対象にはなりませんので、ご了承願います。