力Fの座標は、3つの力トランスデューサF1、F2、F3を用いて測定が可能です。
力Fの座標は、3つの力トランスデューサF1、F2、F3を用いて測定が可能です。
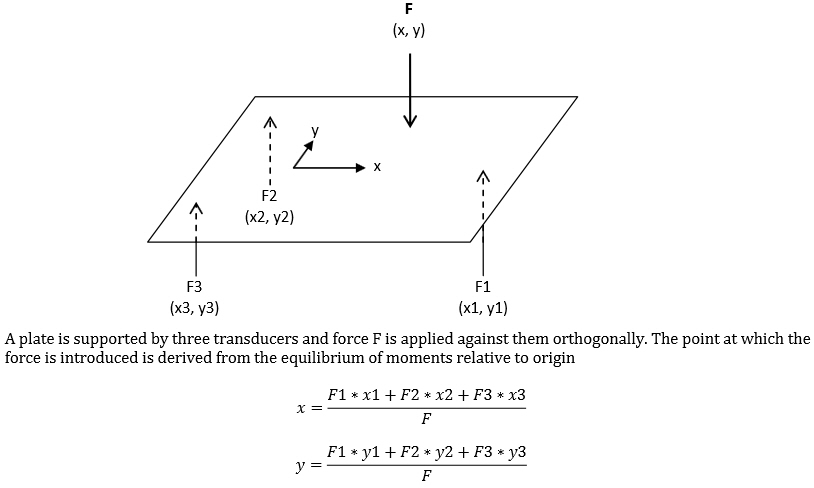
力Fは、3点の合計です。
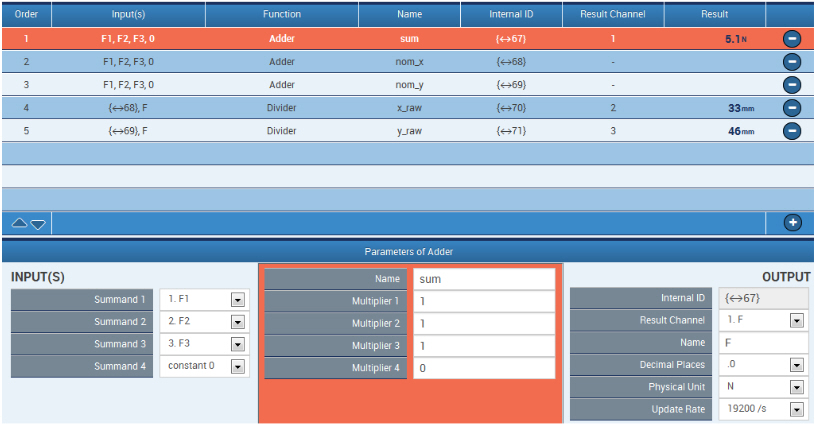
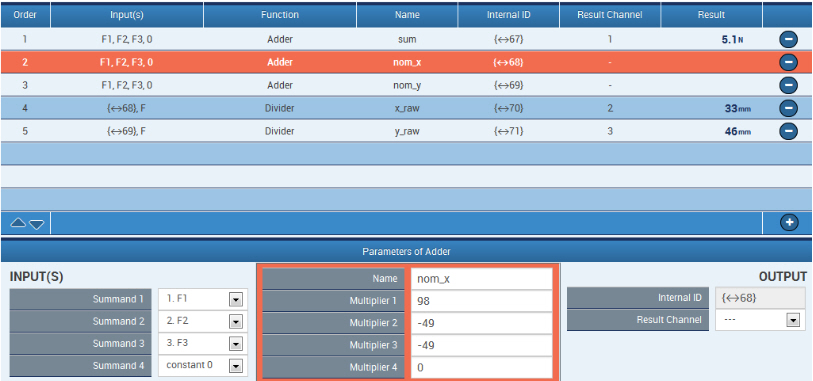
xとyの計算のためのカウンタは、中間ステップで決定されます。
X1、Y1、X2を調整し、加数の要因です。
For y:
For y:
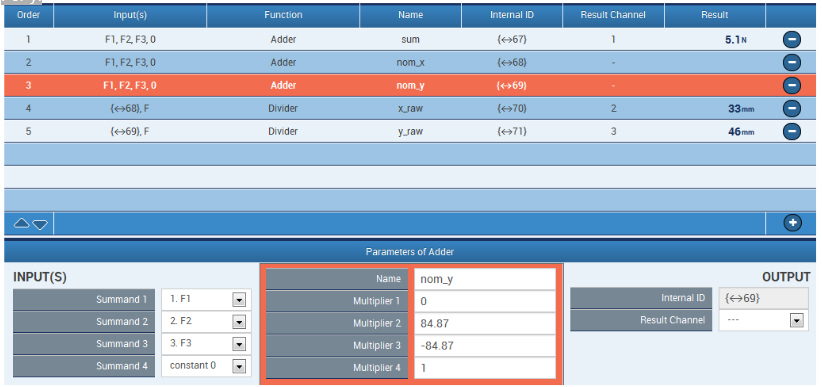
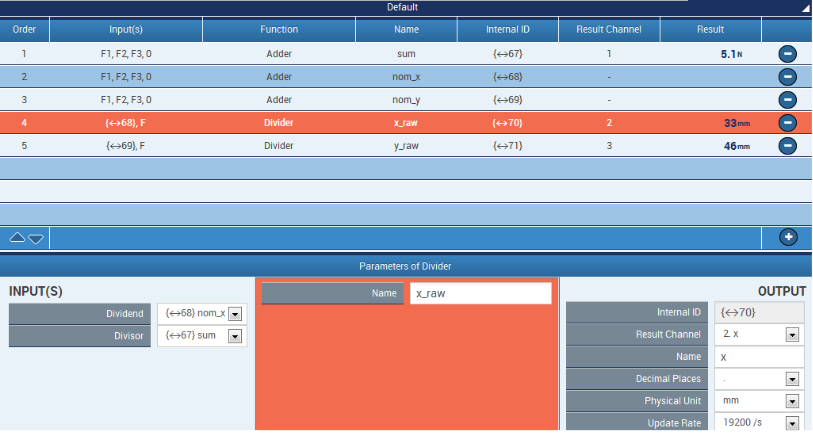
最後に、x及びyは2つの部門で計算される。 X用の計算は(yが似ていいます)
ここに示されています。
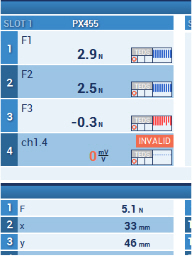
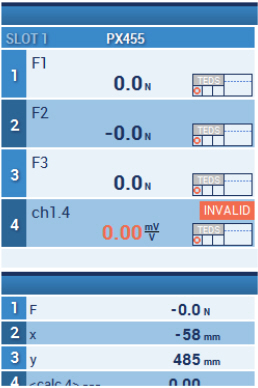
無負荷状態
Fがゼロに近いときにノイズが優勢です。信じがたい値は、xとyのために返されます。
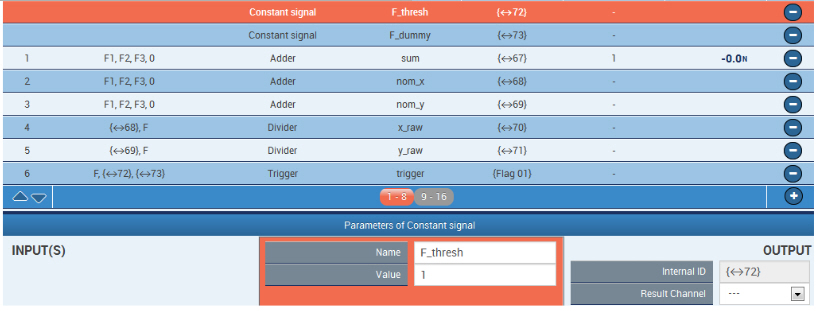
対策: 例えばFは1より大きいNになるまで、xとyの出力が正規ではない。それ以外の場合はゼロが毎回返されます。
Fが最小値よりも大きい場合にトリガブロックがFlag_01を設定します。

トリガーのための2つの限界値。唯一の下側スイッチングしきい値は、値がはるかに測定範囲を超えている上限しきい値を選択した1 N.に必要です。

3つの力トランスデューサで、プレート上の力の導入点を決定します。
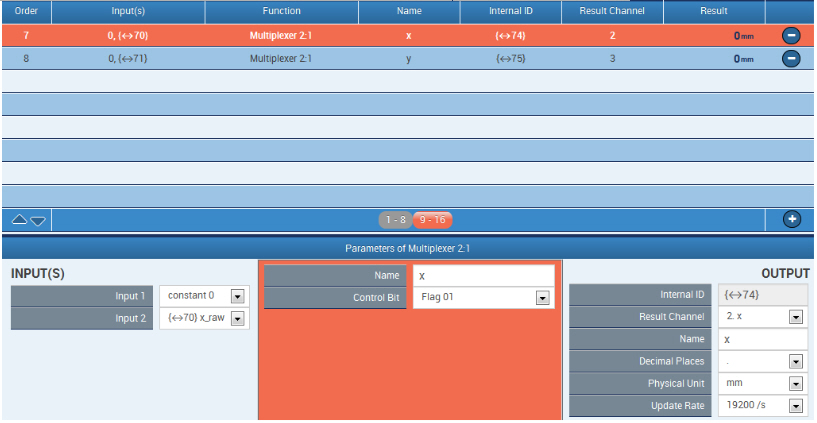
二つの多重ブロックがゼロ値と計算値との間で切り替える。 xについてここに示されています。

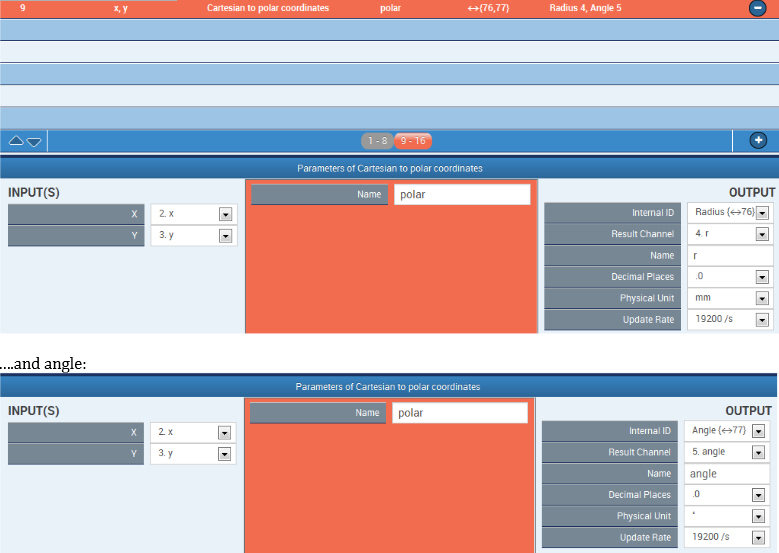
半径の設定
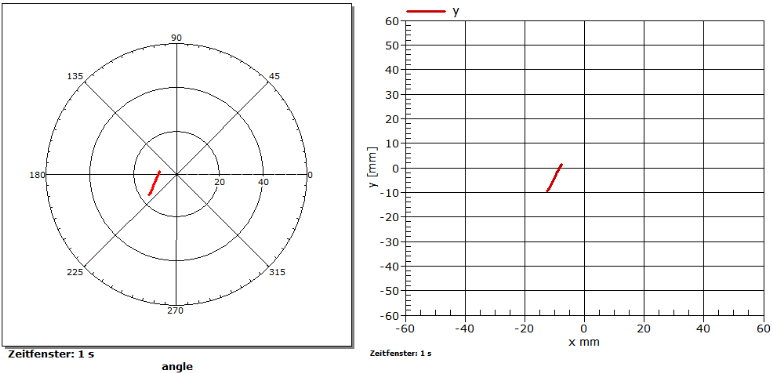
極座標と直交座標では、catmanと移動力の表記の場合
ここに記載した事例は、お客様にご参照いただくためのものです。いかなる形でも、保証や賠償の対象にはなりませんので、ご了承願います。