Fは、上に対してチェックされ、測定された力と低許容値です(F_maxとF_min)
二つの値テーブルは、測定された変位に応じて、許容値を返します。図は、力/時間曲線と許容限界の無違反のストローク運動の force/ displacementcurveを示しています。
PMXとの許容帯域に対して力をチェック
力と変位の測定とストローク運動の間、力が継続的に許容帯域に対してチェックされます。許容範囲は、変位に応じて定義される。カウンタ状態がゼロより大きい場合、カウンタは、公差ずれとデジタル出力レポートをカウントします。カウンタの状態は、自動的にそれぞれのストローク運動の先頭に削除されます。
(必要なグラフはファームウェア1.34から始まるものです)
はじめに

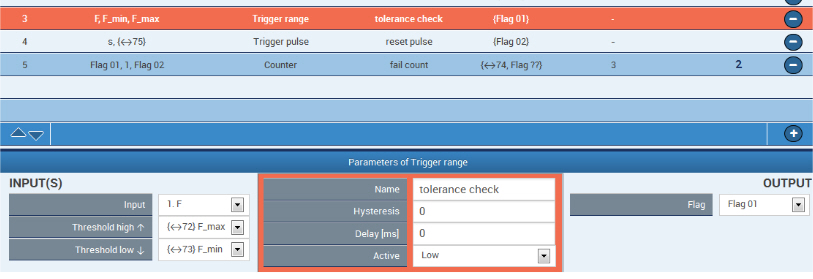
「トリガー(範囲)は「グリフは許容範囲と力Fを比較します。公差ずれがFlag_01で示され、カウンタブロックでカウントされる。
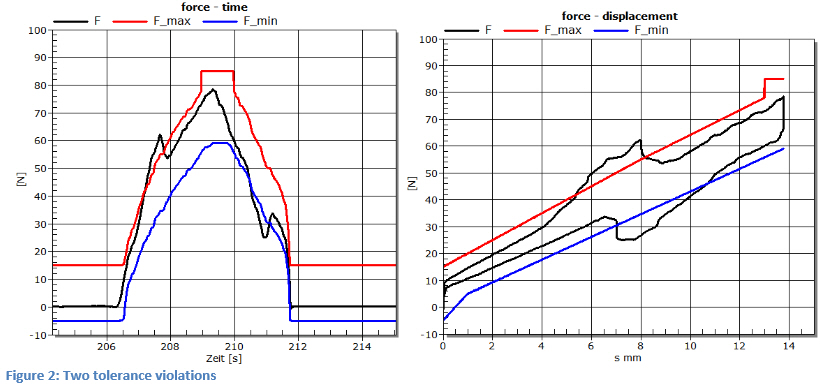
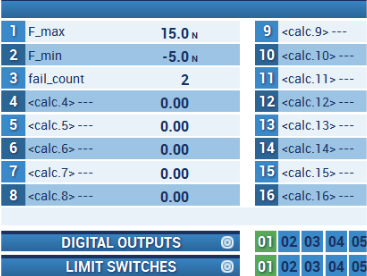
2公差ずれのoverview。デジタル出力01はエラーを示します。
手順
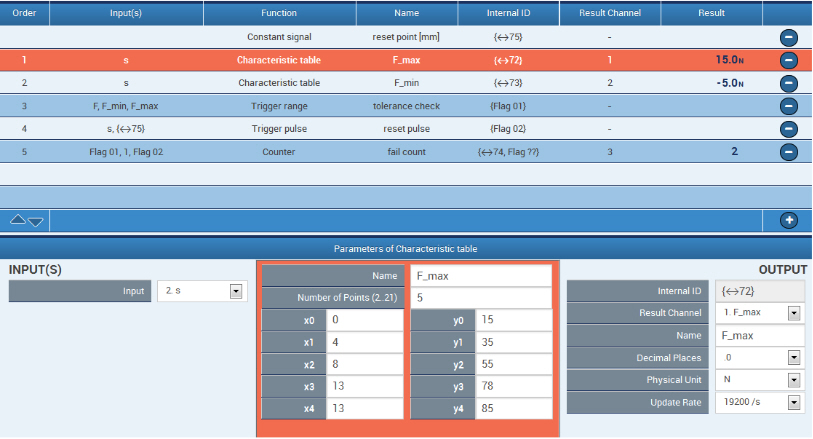
許容上限ラインのテーブルには、変位軸上の5点を有している。xの値は、mm単位の変位であり、yの値はNの力の許容限度です。
ヒント:同じxの値を持つ点は、x3=x4=13で、この場合、特性曲線でジャンプを生産する。
低公差ライン用テーブル
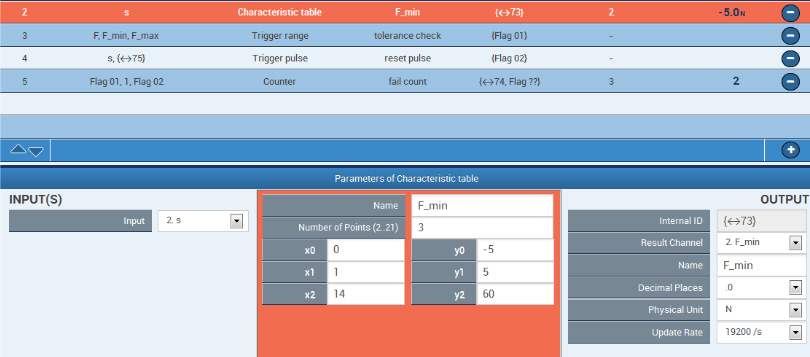
トリガーブロックは、許容限度とFを比較します。出力「Flag_01」は公差内の低い値です。
カウンタブロックは、公差ずれをカウントします。これは、Flag_02で削除されます。
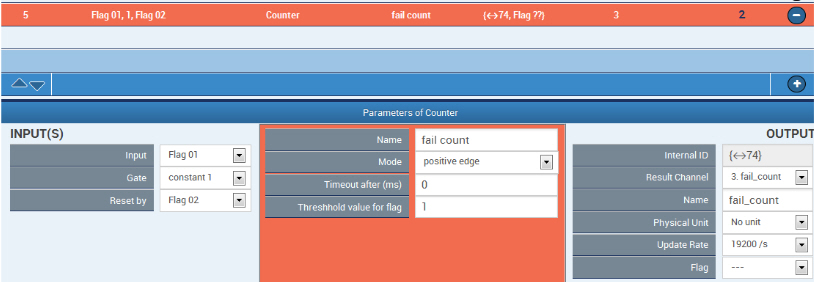
リミットスイッチ No. 1 は、カウンタの状態を> =1を検出します。

最後に、デジタル出力の No. 1 のリミットスイッチの No. 1 の状態を出力する。

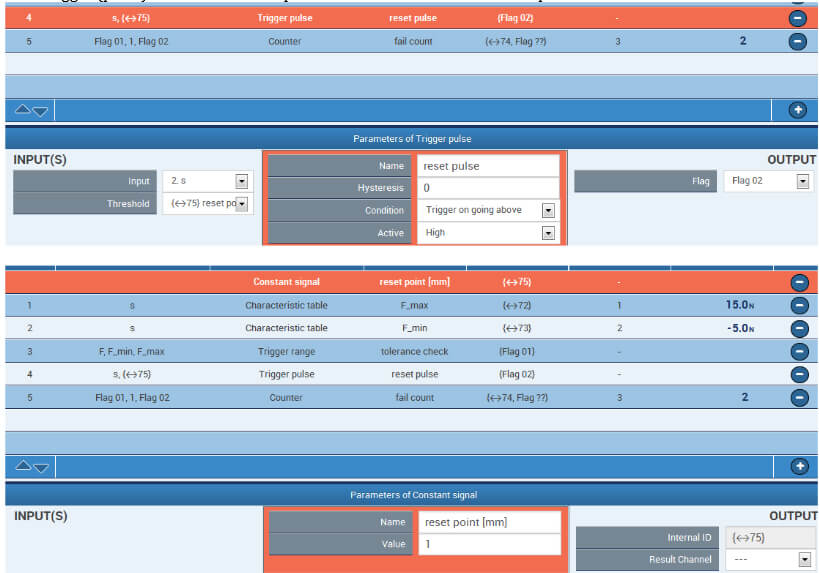
変位が1mmを超える場合に「トリガ(パルス)」ブロックは、カウンタを削除するためにパルスを返します。
免責事項
ここに記載した事例は、お客様にご参照いただくためのものです。いかなる形でも、保証や賠償の対象にはなりませんので、ご了承願います。