計算チャンネルを作成
Analysisカテゴリで、新しい計算チャンネル「rotation synchronous filter」を作成してください。
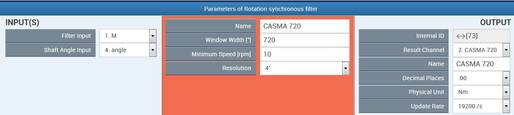
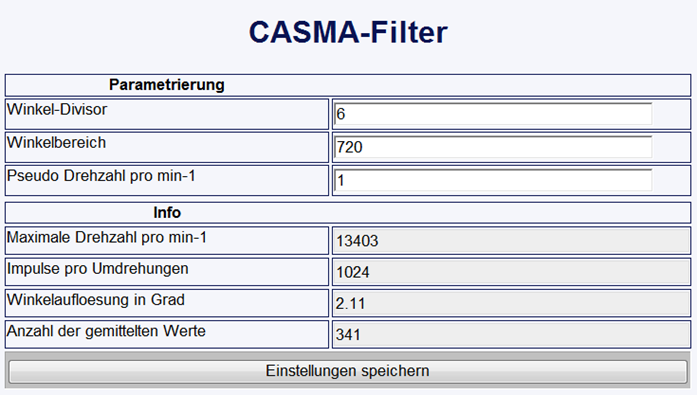
パラメータを調整します
- フィルタ入力: フィルタする信号を入力。
- 軸角度入力: 回転角度のセンサ信号をここに入力。計測値が、0°と360°の間あるのを確認してください。
- ウィンドウ幅: 移動平均線を取る範囲を指定してください。範囲は30°と720°の間で、デフォルト設定は180°とします。ウィンドウ幅対分解能の比率は必ず180未満となります。
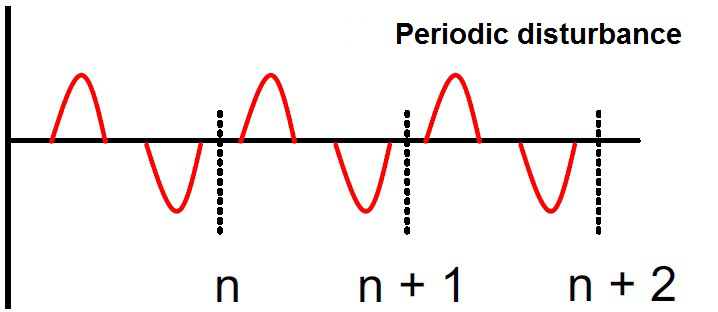
外乱が周期的に繰り返されるタイミングを回転角に対して実験的にあてはめることによって、簡単に使用範囲(ウィンドウ幅)を決定できます(画面のコピーを参照)。この例には、周期的外乱が720°毎にあります。

- 最小速度: 実際の回転速度が定義された最小回転速度より小さいときに、この仮想の回転速度は適用されています。
- 分解能: この値は、新しい平均値がどれくらいの頻度で(各測定が何度の時に)計算されるかを決定します。 総合的アップデート率に従って計算速度が決定されるので、受入れられた最大許容回転速度はこの値に依存することに注意してください。
理論値は以下の式により計算できます: 最大回転速度=分解能X総合的アップデートレート/6
実務では、この理論的に可能な最大回転速度の10~20%に達する値を使用してください。
分解能 | 総合的アップデート率1万9200Hzにおける理論上の最大回転速度 | 総合的アップデート率38,400Hzにおける理論上の最大回転速度 |
1° | 3200 rpm | 6400 rpm |
2° | 6400 rpm | 12,800 rpm |
4° | 12,800 rpm | 25,600 rpm |
6° | 19,200 rpm | 38,400 rpm |
8° | 25,600 rpm | 51,200 rpm |
ウィンドウ幅によって、以下の回転数の倍数は抑制されます:
ウィンドウ幅 | 倍数 |
90° | 4, 8, 12, … |
120° | 3, 6, 9, … |
180° | 2, 4, 6, … |
360° | 1, 2, 3, … |
720° | 0, 5, 1, 1, 5, … |
注意: 信号源の1つが無効である場合は、出力信号も無効になります。
動作中のCASMA
フィルタなしのトルク信号(赤)、CASMAフィルタされたトルク信号(緑)。CASMAフィルタにより、時間軸に対して変化するエンジン速度に相関して非常に安定したトルク計測値ができる事が明らかになりました。このフィルタは幅が大きければ大きいほど、結果が良くなります。