高精度なダイナミックパワー計測
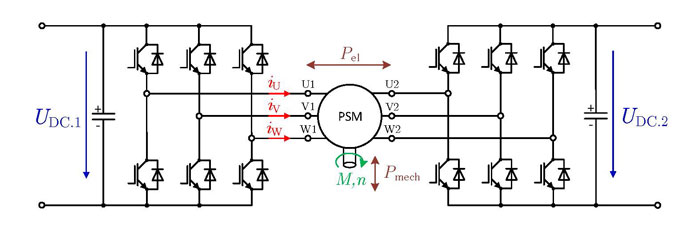
産業用途や電動モビリティ用に使われる電気駆動システムの効率評価には、高精度かつダイナミックな電力計測が必要になります。本稿では、こうした用途での一例として、2 レベルインバータ、三相電動モータ、ならびに電源で構成される電気駆動システムを計測対象としたパワー解析手法について述べます。
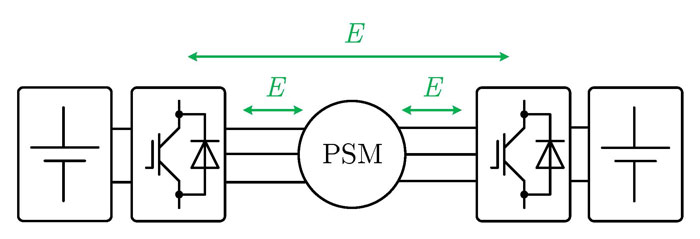
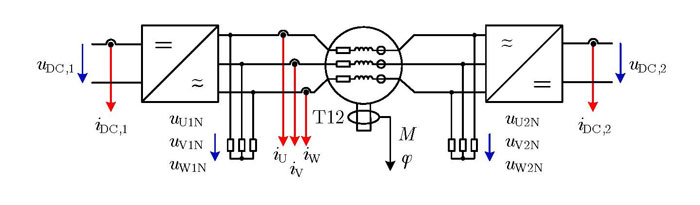
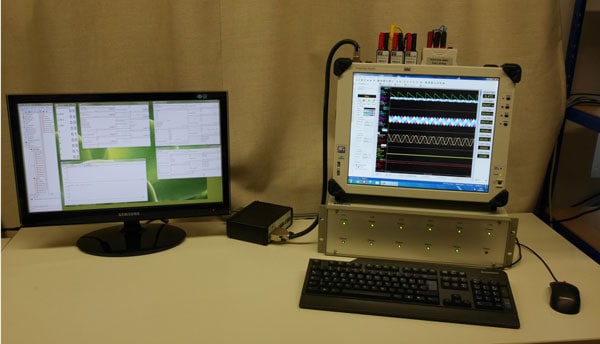
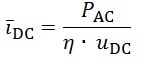
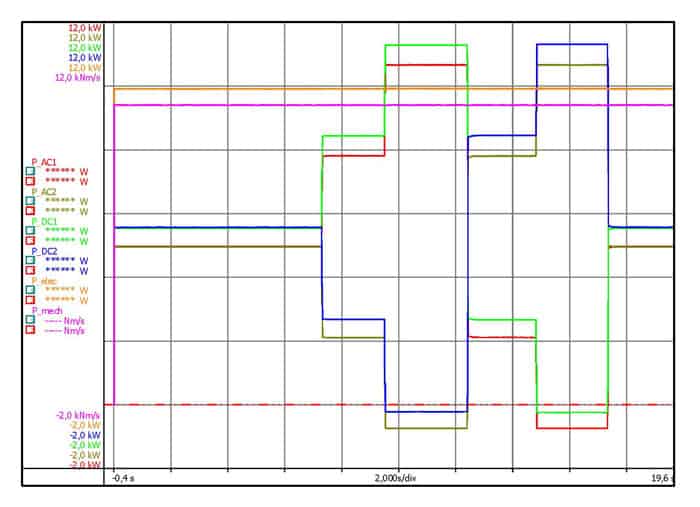
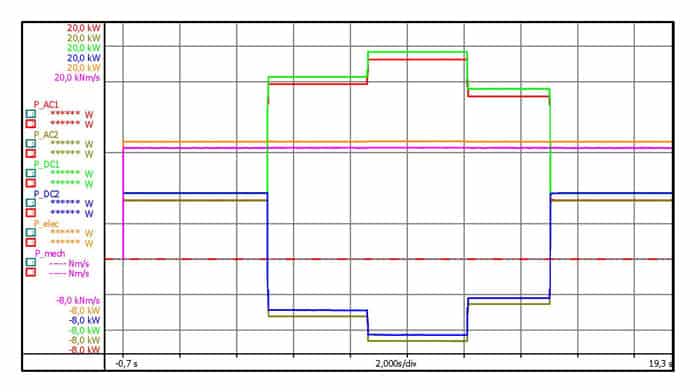
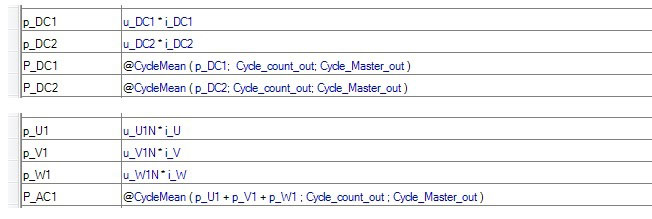
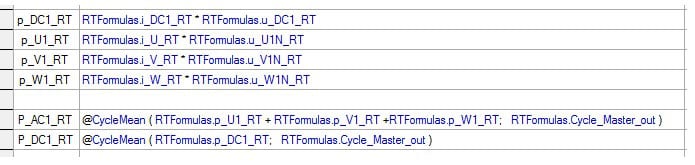
最初にデュアル2 レベルインバータ(dual two-levelinverter: DTLI)回路について解説し、次にHBM のモバイルデータ収集システム Genesis High Speed シリーズ(以後GEN3i)を用いた電気/機械パラメータの収集、およびリアルタイムでの電力演算方法について紹介します。