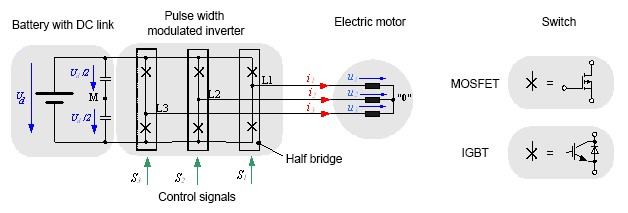
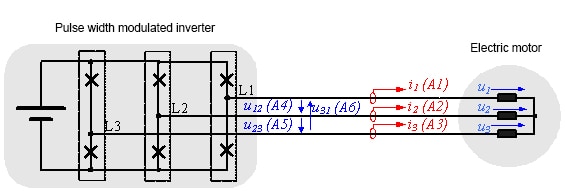
전기 모터의 스타 포인트에 접근 불가능하다면, 스타 전압(u1, u2, u3) 을 직접적으로 계측할 수 없습니다. 하지만, “인위적 스타 포인트”로 전압 계측이 가능할 수 있습니다. 그림3.1과 같이 인위적 스타 포인트는 3개의 동일한 고임피던스 저항기로 구성됩니다. 이 스타 전압과 전류(i1, i2, i3)로 펄스 폭 변조방식 인버터에 의한 순간 전압을 산출할 수 있습니다.

(3.01)
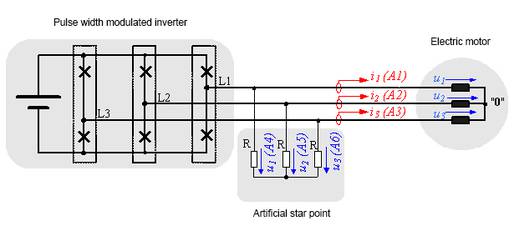
Fig. 3.2: 인위적 스타 포인트(Star point)로 전력을 계측하는 회로도
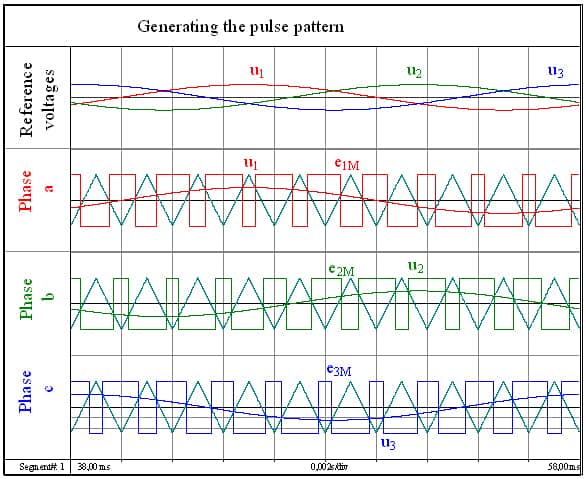
그림3.3은 인위적 스타 포인트를 활용한 계측 결과입니다. 이 경우, 펄스 폭 변조방식 인버터는 비동기식 기계를 제공합니다. 3개의 모든 라인에서 전류와 전압을 계측합니다. 펄스 폭 변조방식 인버터의 펄스 전압에도 불구하고, 전류는 여전히 거의 사인 곡선입니다. 따라서, 전류 신호를 이용해 전력 계측의 평균값 계산용 주기 시간을 유도합니다. 전류 신호 지속 기간과 주기 i1 곡선을 비교하여 주기 시간이 정확하게 탐지됐는지 쉽게 확인할 수 있습니다
3라인 전류 간의 120° 상전환은 회로 선도에서 확인 가능합니다. 흔히 비동기식 기계에서 보듯이, 전류는 상대적으로 전압 뒤에 따라 옵니다.
펄스 폭 변조방식 인버터에서 전달된 총 유효전력은 순간 전력 평균값을 계산하여 결정됩니다. 방정식3.02는 퍼셉션 소프트웨어에서의 과정을 보여줍니다.
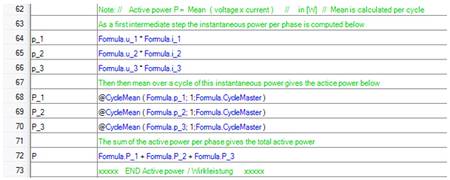
(3.02)
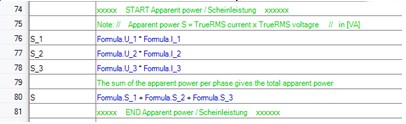
피상 전력 S는 전류 RMS 값과 전압 RMS 값의 산물입니다. RMS 값은 한 주기 동안 계산되며, cycleDetect 명령으로 전류 곡선 i1에서 지속 기간을 결정할 수 있습니다.
피상 전력은 아래의 방정식으로 Perception software에서 산출될 수 있습니다.:
(3.03)
무효 전력 Q는 각 라인 별로 다음의 식에서 산출됩니다.

(3.04)
총 무효 전력은 모든 개별 무효 전력의 합으로, 다음 방정식으로 퍼셉션 소프트웨어에서 산출될 수 있습니다.:
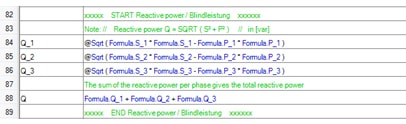
(3.05)