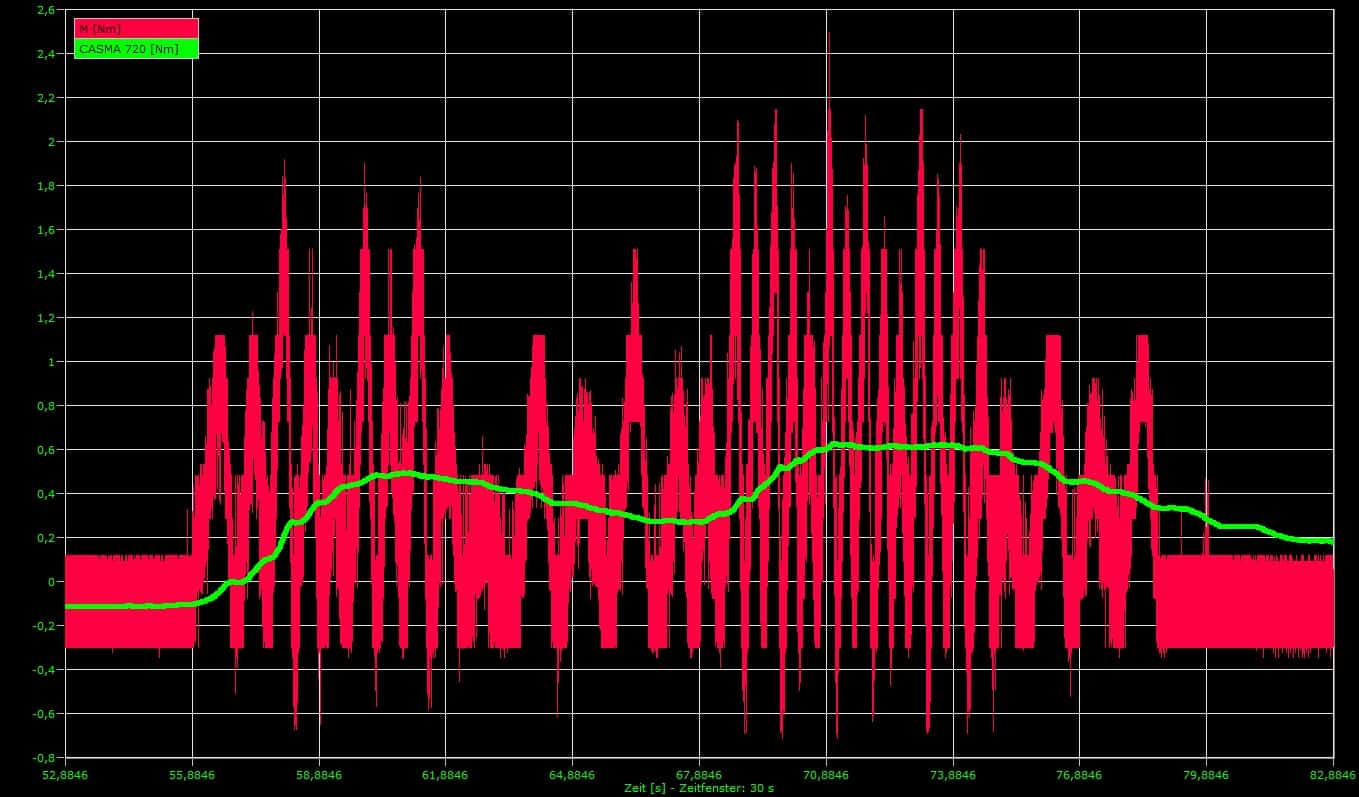
각각의 실린더 내에서의 압축과 팽창을 포함하는 연소 엔진의 스트로크와 이에 상응하는 연소의 변동으로 인해 엔진에서 생성하는 토크는 매우 역동적인 형태를 나타냅니다. 이러한 장애 요소로 인해 원하는 측정값을 얻지 못할수도 있습니다.
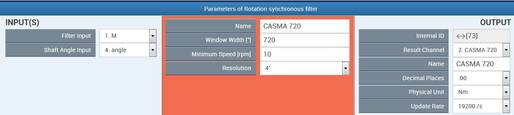
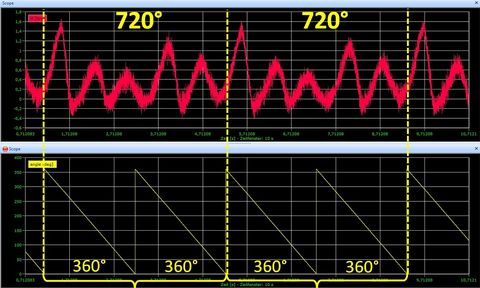
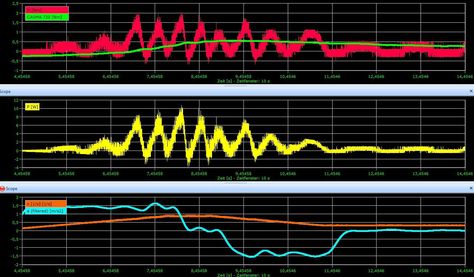
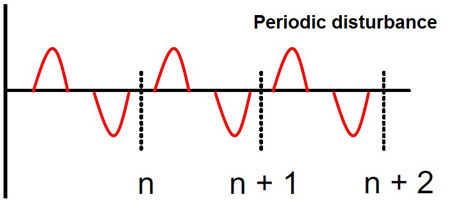
CASMA 필터는 샤프트의 회전과 동시에 일어나는 주기적인 장애요소를 제거해 줍니다. 이 필터는 기존과는 달리 시간적 동기화 방식으로는 작동하지 않으며 오히려 샤프트 회전과 동기화 되어 작동합니다. 따라서 필터 효과는 회전 속도와는 상관이 없습니다.
필터의 측정 시간은 회전 속도에 비례하므로 회전이 멈추면 필터도 작동을 멈춥니다.