계산 채널 생성
Analysis 카테고리에서 계산 채널 'rotation synchronous filter'를 새로 생성합니다.
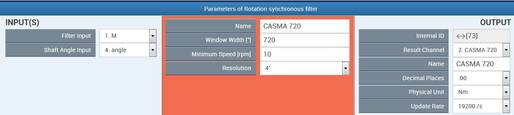
Adjust parameters
- Filter Input: 필터링 할 신호를 입력합니다.
- Shaft Angle Input: 회전각 센서의 신호를 여기에 입력합니다. 측정값은 반드시 0°~360° 사이여야 합니다.
- Window Width: 이동평균을 측정할 범위를 여기에 명시합니다. 폭은 반드시 30°~720°라야 합니다. 기본 설정값은 180°입니다. Window width 대 Resolution의 비율은 반드시 180 미만이여야 합니다.
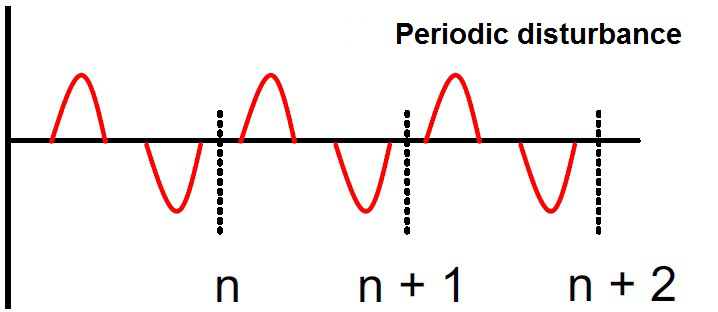
Periodic time on the disturbance를 회전각에 투영시키면 window width는 실험적으로 쉽게 계산이 가능합니다. 이 예에서는 720°마다 주기적 외란을 갖습니다.

- Minimum Speed: 지정된 최저 회전 속도보다 실제 회전 속도가 더 낮으면 가상 회전 속도가 적용됩니다.
- Resolution: 해상도 값은 평균이 새로 계산되는 빈도(매회의 degree)입니다. 주: 계산 속도는 총 업데이트 속도에 영향을 받으므로 허용 가능한 최대 회전 속도는 해상도에 따라 달라집니다.
이론적인 해상도 값은 다음과 같이 계산합니다: 최대 회전 속도=해상도*총 업데이트 속도/6
실제 사용 시에는 이론적으로 가능한 최대 회전 속도의 10~20%만 사용하는 것이 좋습니다.
Resolution | 총 업데이트 속도 19,200Hz에서 이론적인 최대 회전 속도 | 총 업데이트 속도 38,400Hz에서 이론적인 최대 회전 속도 |
1° | 3200 rpm | 6400 rpm |
2° | 6400 rpm | 12,800 rpm |
4° | 12,800 rpm | 25,600 rpm |
6° | 19,200 rpm | 38,400 rpm |
8° | 25,600 rpm | 51,200 rpm |
아래 window width별로 회전 속도는 배수 단위로 억제됩니다.
Window width | Multiples |
90° | 4, 8, 12, … |
120° | 3, 6, 9, … |
180° | 2, 4, 6, … |
360° | 1, 2, 3, … |
720° | 0, 5, 1, 1, 5, … |
Note: 소스 신호(source signal) 중 무효 신호가 있으면 출력 신호도 무효값이 나옵니다.
CASMA 사용 예
CASMA 필터가 토크 측정에서 엔진 속도와 상관관계를 가지며(시간 흐름에 따라 변동) 탁월한 안정성을 제공했음을 분명히 보여주고 있습니다. 필터의 폭이 넓으면 넓을수록 결과도 더 좋아집니다.