전기차 모터를 위한 정밀한 측정법
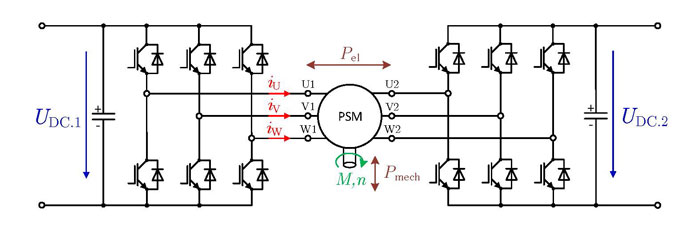
전동기를 사용하는 산업 현장에서 이루어지는 전기모터에 대한 평가와 시험 에는 매우 정밀한 측정이 필요합니다. 이러한 분야에 사용하는 전기 시스템은 일반적으로 2단 인버터(two-level inverter), 3상 전기장치(three phase electrical machine), 그리고 이러한 장치에 적합한 전원으로 이루어져 있습니다.
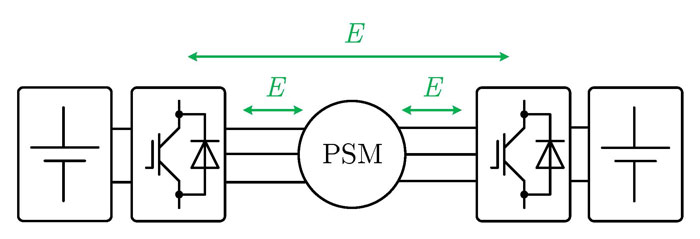
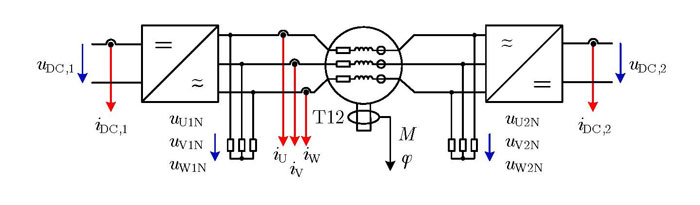
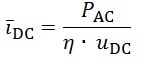
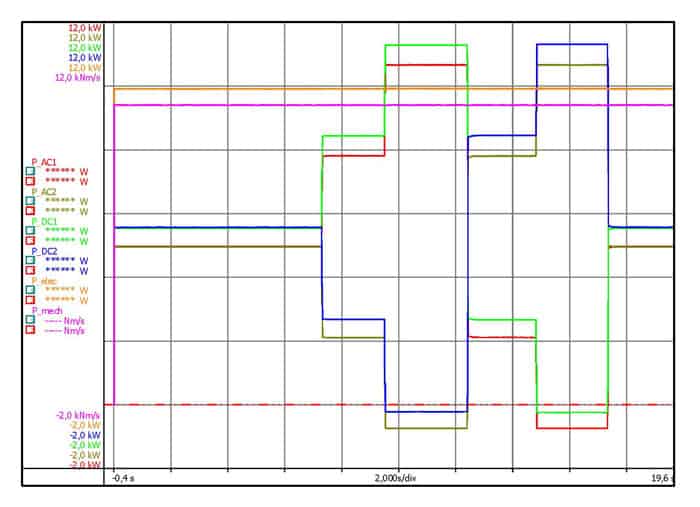
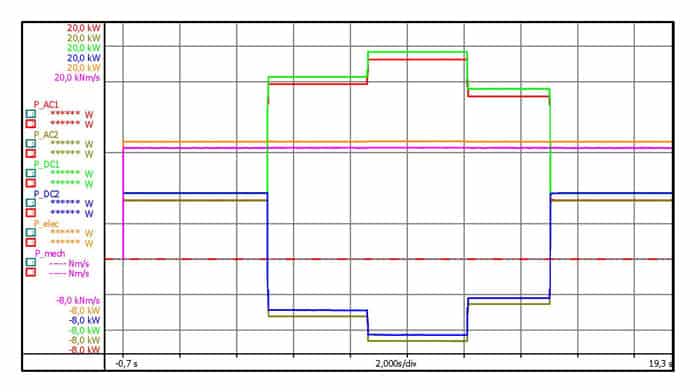
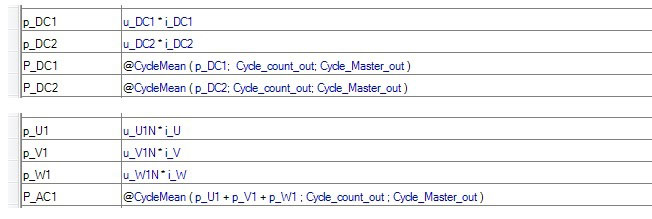
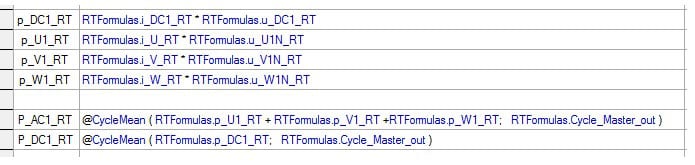
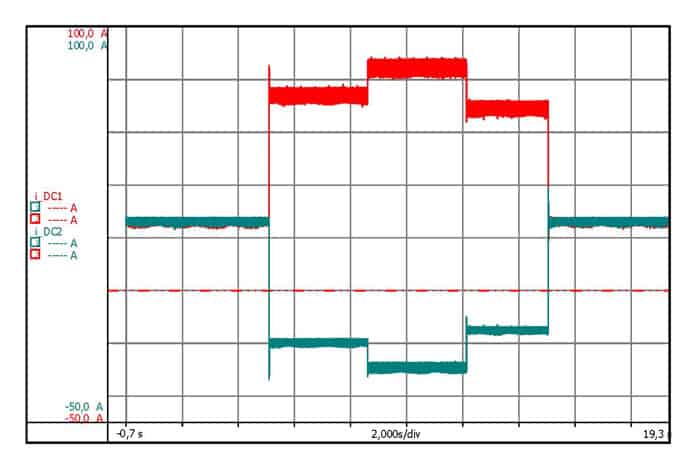
이번 기사는 먼저 듀얼 2단 인버터(DTLI)의 구조가 자세하게 제시되어 있고, 이어서 GEN3i 데이터 획득 시스템을 이용한 기계적 변수와 전기적 변수의 획득, 실시간 출력 값 계산에 관한 내용이 제시되어 있습니다.