Medições em um Motor de Indução CA Alimentado por Inversor
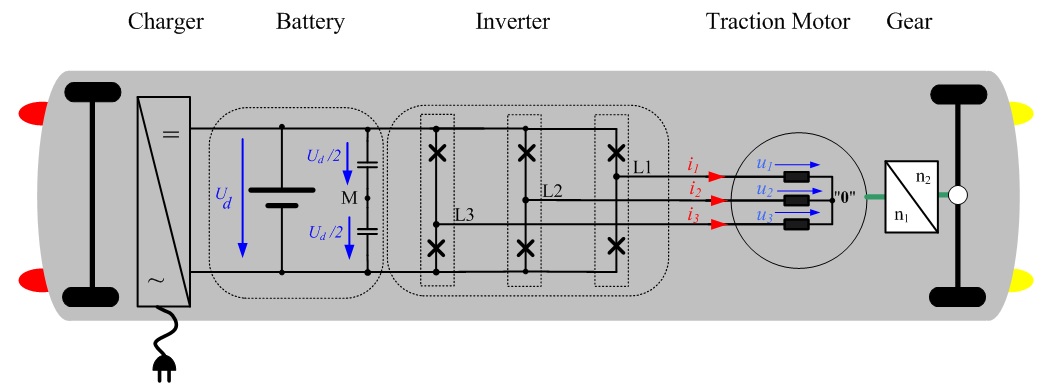
A fig. 3.1 mostra o comportamento temporal de um motor de indução CA alimentado por inversor de tensões de fase (u1 (t), U2 (t), U3 (t)) e correntes de fase (i1 (t), i2 (t), i3 (t)). As direções das correntes e tensões de contagem são mostrados na visão geral da figura 1.1. As grandezas vetoriais espaciais podem ser calculadas a partir das grandezas de fase medidas através da equação 2.02. Devido ao fato de que no Perception todas as variáveis precisam ser números reais, as partes reais e imaginárias do vetor espacial são calculados separadamente. A equação a seguir mostra este cálculo para a tensão de fase e a corrente de fase.

(3.01)

Fig. 3.1: Grandezas de fases medidas (i1,i2,i3,u1,u2,u3) e grandezas vetoriais espaciais calculadas (ia,ib,ua,ub) (Para usuários do Perception, essas medidas estão disponíveis no seguinte arquivo: Space Vector and Air GapTorque. pNRF. Este arquivo está disponível para download no site da HBM).
Cálculo do fluxo do estator de um motor de indução CA alimentados por inversor
O vetor espacial do fluxo do estator  descreve o campo magnético em um motor de indução CA alimentado por inversor. O vetor espacial do fluxo do estator é obtido por integração da diferença entre a corrente do estator e a queda de tensão na resistência Rs do estator do motor.
descreve o campo magnético em um motor de indução CA alimentado por inversor. O vetor espacial do fluxo do estator é obtido por integração da diferença entre a corrente do estator e a queda de tensão na resistência Rs do estator do motor.
(3.06)
A baixa resistência do estator pode ser negligenciada frequentemente com alguns motores, dependendo dos requisitos de precisão. Como resultado da integração, o fluxo do estator é uma grandeza contínua. Embora, como se mostra na fig. 3.1, a tensão do estator mostra largura de banda modulada com comportamento pulsante, o real vetor espacial do fluxo do estator ψα(t) e as partes imaginárias ψβ(t) são aproximadamente senoidais (fig. 3.2a). Como uma aproximação grosseira, a trajetória do vetor espacial do fluxo do estator segue uma trajetória circular. O raio da trajetória circular corresponde à amplitude do fluxo do estator.

Fig. 3.2: Vetor espacial do fluxo do estator do motor de indução CA alimentado por inversor
a) Comportamento temporal da parte real e imaginária
b) Trajetória do vetor espacial no plano complexo
Cálculo do Torque no Entreferro de um Motor de Indução CA Alimentado por Inversor
Com os motores de indução de corrente alternada alimentado por inversor, o chamado torque no entreferro ou interno pode ser calculado a partir da tensão ou fluxo e medições de correntes. O torque no entreferro consiste no torque de atrito interno inevitável do motor e o torque no eixo. Ignorando o torque de atrito, o torque interno calculado corresponde ao torque de aperto mecânico que pode ser medido com grande precisão utilizando um transdutor de torque [3].
A precisão do torque calculado depende do modelo de cálculo utilizado e a precisão de seus parâmetros do motor. O cálculo do torque interno pode ser usado como informação redundante complementando o sinal de medição de um transdutor de torque, porque o seu valor deve ser, pelo menos, da mesma ordem de grandeza que o momento mecânico. Além disso, o torque proporcional de um motor eléctrico pode ser correlacionado com todo o torque medido no sistema de transmissão utilizando um transdutor de torque. Uma aplicação potencial é, por exemplo, em um veículo híbrido, porque o seu motor de combustão e o motor elétrico atuam na mesma transmissão. Com o torque calculado do motor eléctrico, o torque do motor de combustão pode ser determinado.
É conhecido a partir da literatura [2] que o torque interno do motor de indução CA alimentado por inversor pode ser calculado a partir das correntes do estator e os fluxos magnéticos do estator.
(3.06)
Aqui, ρ representa o número de par de pólos do motor de indução CA alimentados por inversor. Correntes e fluxos estão representados pelos componentes vetoriais espaciais. A fig. 3.3 mostra o comportamento temporal das correntes do estator e dos fluxos, assim como o momento internoMi calculado a partir destes valores. A ondulação de torque resultante é claramente visível. Alta freqüência de ondulação de torque é gerada como resultado da operação de comutação do inversor. É essencial identificar corretamente o período da corrente do motor para permitir que o torque no entreferro possa ser calculado no Perception.

Fig. 3.3: Comportamento temporal da corrente do estator (iα, iβ), fluxo do estator (ψα, ψβ) e o torque no entreferro calculado Mi