
- Cada módulo é uma unidade de aquisição de dados
- Operação móvel e autônoma para testes em veículos
- Integração em tempo real para testes em bancada
- Portátil para serviços em campo
- Instalação permanente para aplicações de monitoramento
QuantumX: Sistema de aquisição de dados universal e distribuível
O sistema de aquisição de dados QuantumX (DAQ) é a ferramenta perfeita para todas as suas necessidades de teste e medição. Para obter uma aquisição confiável de dados de diferentes grandezas físicas e tecnologias de sensores, o QuantumX é a escolha certa. Possui a capacidade única de adquirir qualquer informação de sinal e sensor.
Flexível
Confiável
- Estabelecido no mercado por 10 anos e utilizado por milhares de clientes
- Exatidão de medição elevada devido a tecnologia patenteada
- Estabilidade a longo prazo e certificado de calibração integrado
Simples utilização
- Compacto e portátil
- Operação intuitiva com software catman da HBM
- Aberto para diversas plataformas de software: LabVIEW, Visual Studio .NET, DIAdem, CANape, DASYlab, …
Cadeia de medição confiável
O altamente preciso, universal e confiável sistema de aquisição de dados QuantumX pode ser perfeitamente combinado com os sensores e software catman da HBM para se obter uma solução completa de medição e testes. Desde o sensor até o software: simplesmente "conectar e medir".

Aplicação versátil
 Testes em bancada ou laboratório
Testes em bancada ou laboratório
- Teste de durabilidade estrutural
- Testes em dinamômetro de powertrain, motor, e drivetrain
- Testes de componentes e sistemas mecânicos e elétricos
- Análise de aerodinâmica / testes em túnel de vento
 Aquisição de dados móvel
Aquisição de dados móvel
- Aquisição móvel de carga em componentes mecânicos em vias ruins ou pista
- Teste de dinâmica veicular (conforto e dirigibilidade)
- Testes de aceitação de frenagem
- Monitoramento geral do veículo em pista
 Testes de aeronaves
Testes de aeronaves
- Teste de durabilidade estrutural / Teste de fadiga
- Teste de propulsores (empuxo, desempenho, durabilidade)
- Iron bird testing
- Teste de impacto: teste de queda e impacto (ave, drone)
- Análise de centro de gravidade
 Drives elétricos e Armazenamento de energia
Drives elétricos e Armazenamento de energia
 Serviço/Manutenção
Serviço/Manutenção
- Calibração de máquinas
- Diagnóstico e investigação de falhas
 Monitoramento de saúde em infraestruturas
Monitoramento de saúde em infraestruturas
Customer Stories & Testimonials

Sikorsky, uma empresa Lockheed Martin, e a HBM concluíram o processo de homologação chamado de ORR (Operation Readiness Review) para no novo sistema de aquisição de dados GEN6, que agora entrará oficialmente em operação.
Baseado no sistema universal de aquisição de dados QuantumX da HBM e desenvolvido em cooperação com o cliente, este novo sistema GEN6 irá equipar os laboratórios da Sikorsky com novas capacidades para aquisição de dados, operação e armazenamento de dados.

"Nosso processo de seleção para sistemas de amplificação chegou a 4 fornecedores. Então, o QuamtumX da HBM nos convenceu no teste prático, especialmente com sua incerteza de medição extremamente baixa."
Bruno Kanzenbach, Engenheiro Senior na Toyota Motorsport GmbH (TMG)

"Escolhemos o QuantumX por podermos conectar qualquer sensor a ele de maneira simples, além de possuir uma excelente capacidade de armazenamento tanto em termos de tempo quanto taxa de amostragem."
Matt Williams, Engenheiro Senior de Testes Estruturais na Agusta Westland

Comparação dos módulos
Encontre e compare os módulos QuantumX que precisa clicando na imagem à direita.
Encontre qual módulo de medição ou sistema é mais adequado para sua aplicação, baseado no número de canais, taxa de amostragem ou tipo de sinal como tensão, corrente, strain gauge, etc.
Tendo encontrado o módulo QuantumX que se adequa a suas necessidades, desça até abaixo na página para ver mais detalhes sobre o equipamento em questão.
Clique na imagem ao lado para aumentá-la.
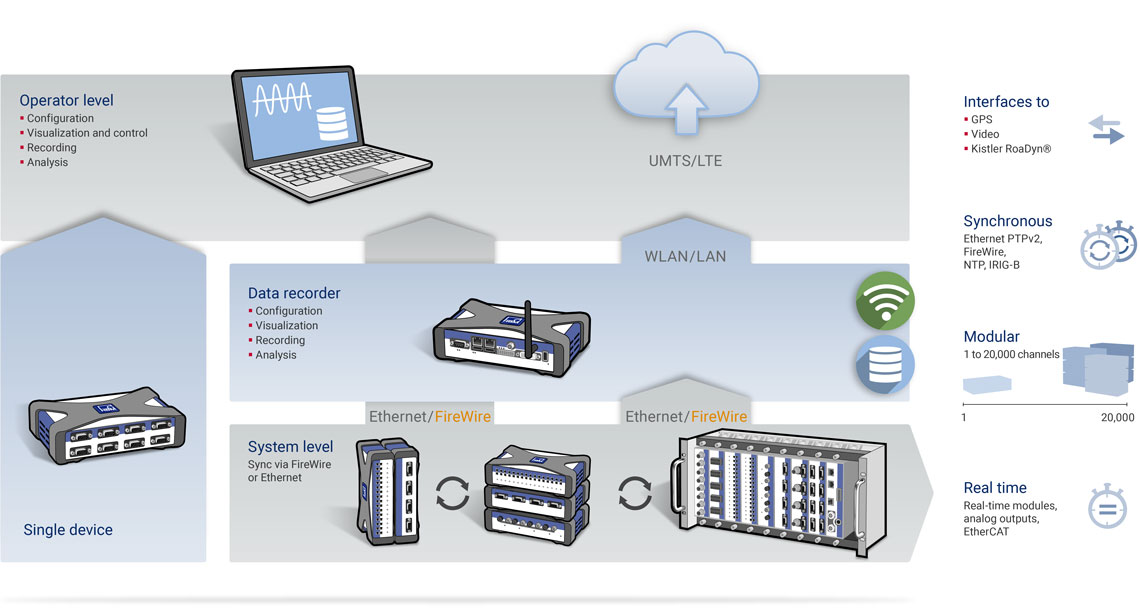
Conceito modular
Conecte um único módulo ao seu PC e comece a medir
Distribua diversos módulos e os instale próximos aos pontos de medição e sensores
Gerencie centenas de canais de maneira centralizada para grandes densidades de canais
Utilize o poderoso registrador de dados para seu teste móvel e autônomo, com integração direta na nuvem
Faça a integração em tempo real em bancadas de teste automatizadas
Crie seu próprio teste com sinais de estímulo em tempo real.
Integre qualquer sensor e transfira seus valores para uma rede CAN ou via saída analógica.
Módulos QuantumX

Amplificador universal MX440B e MX840B
Amplificador universal de 4 ou 8 canais da família QuantumX
Suporta as seguintes tecnologias de transdutor:
- Strain gauges de ponte completa ou de meia ponte (frequência de portadora DC ou 4.8 kHz)
- SG quarto de ponto com adaptador
- Transdutores piezoelétricos alimentados por corrente (IEPE / ICP®)
- Ponte completa piezoresistiva
- Termómetros de resistência (PT100 / PT1000) Termopares (tipos K, N, R, S, T, B, E, J, C)
- Resistor
- Transdutores Potenciométricos (Poti)
- Ponte indutiva meia ponte ou completa, LVDT
- Tensão (± 100mV, ± 10V, ± 60V) e Corrente (0/4… 20 mA, 2-/3- ou 4 fios)
- Canal 5-8, além disso: freqüência, contador, codificador rotativo, SSI
- Barramento CAN
Saiba mais HBMshop Faça a calibração de seu módulo
![]()
Amplificador universal MX410B
Amplificador universal altamente dinâmico de 4 canais da família QuantumX
Suporta as seguintes tecnologias de transdutor:
- SG meia ponte ou ponte completa (DC ou CF com frequência de portadora de 4,8 kHz)
- SG quarto de ponte via adaptador
- Transdutores piezoelétricos alimentados por corrente (IEPE, ICP)
- Ponte completa piezoresistiva
- Meia ponte ou ponte completa indutiva
- Tensão (± 10 V)
- Corrente (0/4 ... 20 mA, 2- / 3- ou 4 fios)
- Saídas de tensão analógica (± 10 V)
Saiba mais HBMshop Faça a calibração de seu módulo
![]()
Módulo de medição de pulso e frequência MX460B
Módulo digital altamente dinâmico de 4 canais da família QuantumX para aquisição de torque, velocidade de rotação, ângulo, posição e deslocamento
Suporta as seguintes tecnologias de transdutor:
- Entradas digitais de frequência de alta resolução (por exemplo, flange de torque da HBM)
- Contador de pulsos, encoder incremental
- Sensores de velocidade de rotação indutiva passiva (acoplamento AC)
- Sinais Modulados por Largura de Pulso (PWM)
Saiba mais HBMshop Faça a calibração de seu módulo
![]()
Amplificador de ponte completa MX430B
Módulo de medição de ponte de 4 canais da família QuantumX para medição precisa de transdutores de strain gauge-full-bridge (dinâmicos, estáticos)
Suporta as seguintes tecnologias de transdutor:
- Ponte completa de tensão (DC, frequência de portadora de 600 Hz)
Saiba mais HBMshop Faça a calibração de seu módulo

Amplificador de medição de precisão MX238B
Módulo de medição de precisão de 2 canais da família QuantumX para medição precisa quando os transdutores SG de ponte completa estão conectados
Suporta as seguintes tecnologias de transdutor:
- SG de Ponte completa (frequência portadora de 225 Hz)
Saiba mais HBMshop Faça a calibração de seu módulo
![]()
Amplificador de ponte para strain gauges MX1615B / MX1616B
Amplificador de ponte de 16 canais da família QuantumX
Suporta as seguintes tecnologias de transdutor:
- SG ponte completa ou meia ponte (frequência portadora DC ou 1200Hz)
- SG quarto de ponte (DC ou 1200 Hz de frequência de portadora, resistências de complemento de ponte de 120/350/1000 ohm)
- Tensão (± 10 V)
- Termômetros de resistência (Pt100)
- Resistor
- Potenciômetro (Poti)
Saiba mais HBMshop Faça a calibração de seu módulo
![]()
Amplificador universal MX1601B
Amplificador de 16 canais da família QuantumX
Suporta as seguintes tecnologias de transdutor:
- Transdutores piezoelétricos alimentados por corrente (IEPE, ICP)
- Tensão (± 100 mV, ± 10 e ± 60 V)
- Corrente (0/4 ... 20 mA, 2- / 3- ou 4 fios)
Saiba mais HBMshop Faça a calibração de seu módulo
![]()
Amplificador de termopar MX1609
Amplificador de termopar de 16 canais da família QuantumX
Suporta as seguintes tecnologias de transdutor:
- Termopares tipo K (MX1609KB)
- Termopares tipo T (MX1609TB)
Saiba mais HBMshop Faça a calibração de seu módulo
![]()
Amplificador de termopar isolado MX809B
Amplificador de termopar de 8 canais da família QuantumX para medições de termopar isoladas e confiáveis em um ambiente com sinais elétricos
Suporta as seguintes tecnologias de transdutor:
- Termopar tipos K, J, T, B, E, N, R, S, C com junção fria interna para cada canal
- Tensão (±5 V)
Saiba mais HBMshop Faça a calibração de seu módulo
 Módulo de tensão isolado MX403B
Módulo de tensão isolado MX403B
Módulo de 4 canais para medição de tensão eletricamente isolada com a família QuantumX
Suporta as seguintes medidas:
- Tensão (10, 100 e 1000 V)
- Categorias de medição: 1250 V (não CAT), 1000 V CAT II, 600 V CAT III
Saiba mais HBMshop Faça a calibração de seu módulo
![]()
MX471C CAN FD / Classic CAN
Módulo CAN com 4 canais e suporte a CAN FD ou CAN convencional
- Aquisição sincronizada no tempo de mensagens e sinais elétricos
- Resistor de terminação interno e que pode ser chaveado

Módulo de gateway CX27C
O módulo gateway CX27C oferece opções de integração simples:
- Integração em tempo real de módulos QuantumX/SomatXR (EtherCAT™ ou PROFINET IRT) para regulação, controle, automação e monitoramento
- Paralelo a isto, conexão com o software de medição no PC para aquisição e análise de dados de sinais até 100 KS/s por canal.
![]()
Gravador de dados CX22B-W
O gravador de dados CX22B-W é o data logger perfeito:
-
Armazenamento interno de dados de todos os sinais dos módulos QuantumX / SomatXR conectados
-
Gravação autônoma em um formato de dados robusto, exportação para outros formatos
-
Funcionalidade de gateway (LAN, WLAN) para o PC
-
Cálculos e análise de sinal, por exemplo, contagem, FFT, energia elétrica e cálculos de eficiência
-
Opções excelentes de visualização
-
Integração de câmeras (foto, vídeo), posicionamento (GPS / GNSS), rodas de medição, estação wheather
-
Alarmes de estado do sinal e do sistema / notificações
-
Controle fácil (touchscreen, controle remoto ou teclado diretamente conectado)
![]()
MX471C CAN FD / Classic CAN
Módulo CAN com 4 canais e suporte a CAN FD ou CAN convencional
- Aquisição sincronizada no tempo de mensagens e sinais elétricos
- Resistor de terminação interno e que pode ser chaveado
![]()
Módulo de saída analógica MX878B
Módulo de 8 canais para a saída de tensões analógicas dentro da família QuantumX
O módulo oferece as seguintes características:
- 8 saídas analógicas de tensão (± 10V) para saída em tempo real de qualquer entrada de sensor
- Cálculos em tempo real (matriz, PID, alarmes, etc.)
- Definição de perfil de saída (harmônico ou arbitrário)
- Controle direto do PC
![]()
Módulo multi-I/O MX879B
Módulo Multi I/O para a saída de tensões analógicas e entrada/saída digital da família QuantumX
O módulo oferece as seguintes características:
- 8 saídas analógicas de tensão (± 10V) para saída em tempo real de qualquer entrada de sensor
- 32 entradas/saídas digitais (5 V, 24 V, até 500 mA)
- Cálculos em tempo real (matriz, PID, alarmes, etc.)
- Definição de perfil de saída (harmônico ou arbitrário)
- Controle direto do PC
![]()
MX471C CAN FD / Classic CAN
Módulo CAN com 4 canais e suporte a CAN FD ou CAN convencional
- Aquisição sincronizada no tempo de mensagens e sinais elétricos
- Resistor de terminação interno e comutável
Software de aquisição e análise de dados catman
O software catman da HBM combina perfeitamente com QuantumX e SomatXR. O catman permite uma visualização excelente de seu sensor e dados digitais, armazena dados em um formato binário robusto, pode ser automatizado, analisa dados em tempo real ou no modo pós-processo e gera relatórios de teste.
Outros pacotes de software compatíveis:
- LabVIEW
- Microsoft Visual Studio .NET
- CANape
- DASYLab

QuantumX provides you supplementary accessories for your measurement applications and projects.
QuantumX Video & Brochure
Este vídeo demonstra as várias funcionalidades que o sistema QuantumX oferece.
Este vídeo demostra como utilizar o software catman Enterprise para parametrizar e visualizar grandes quantidades de canais de medição.